
#статьи
-
0
Как собрать робота с нуля: пошаговая инструкция
Первая часть гайда по созданию управляемой мини-платформы. Готовим детали и начинаем сборку робота.
Иллюстрация: Катя Павловская для Skillbox Media
Программист-робототехник. Работает c шагающими, летающими, колёсными роботами. А в свободное время сама их конструирует. Увлекается IT и инженерией сама и вас заинтересует!
В интернете полно статей и видео с названиями в духе: «Собираем робота с нуля в домашних условиях». Однако большинство из них довольно беспощадны по части требуемых компонентов и сложны для новичков: повторяешь точь-в-точь все шаги из инструкции, вот только у авторов всё работает, а у тебя почему-то нет.
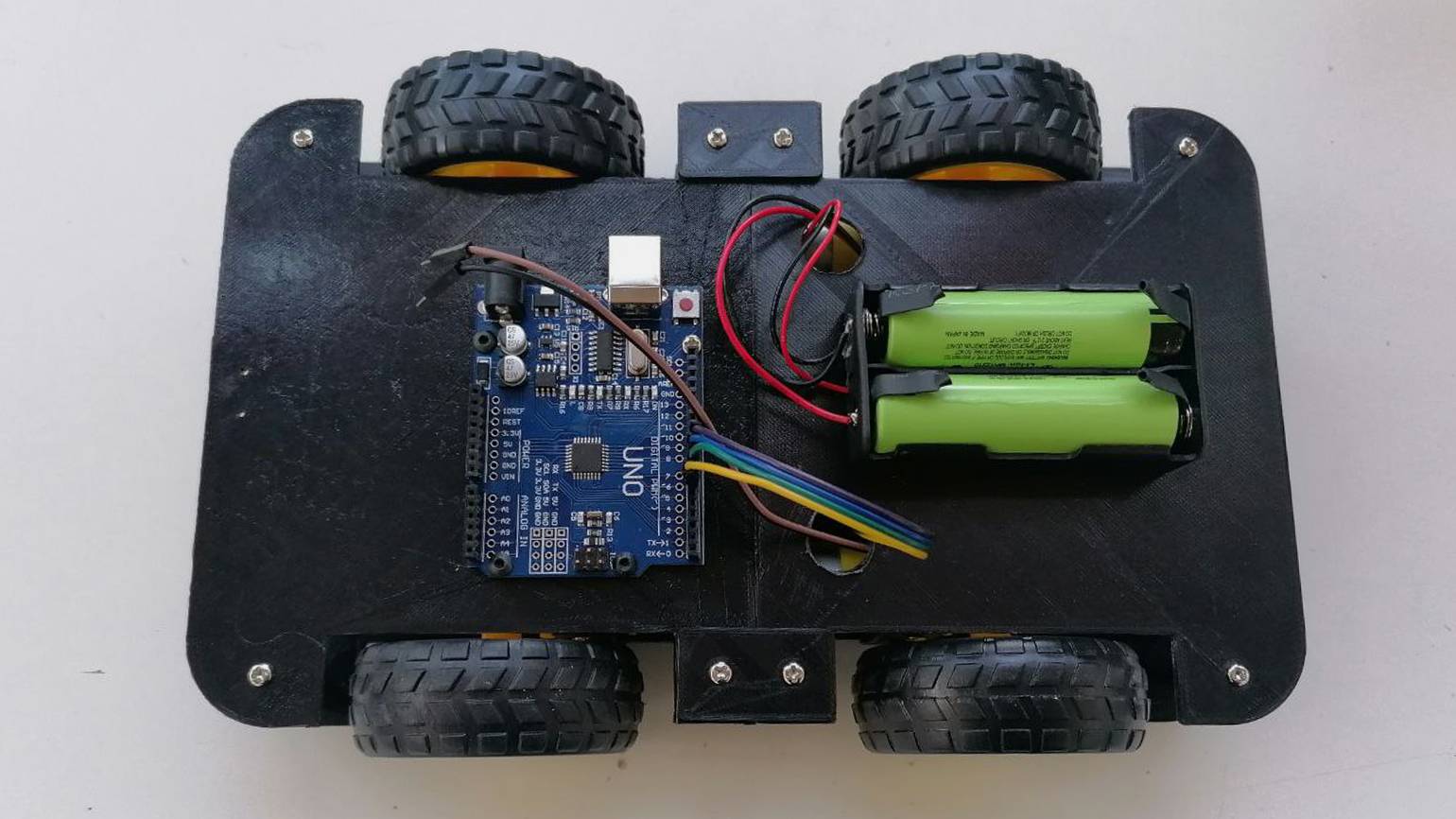
Поэтому мы решили подготовить собственное руководство для тех, кто жаждет собрать робота, но не знает, как подступиться к этому делу. Вы узнаете, как собирать (и обязательно соберёте!) собственного робота — машинку на дистанционном управлении. Выглядеть наш агрегат будет примерно так:
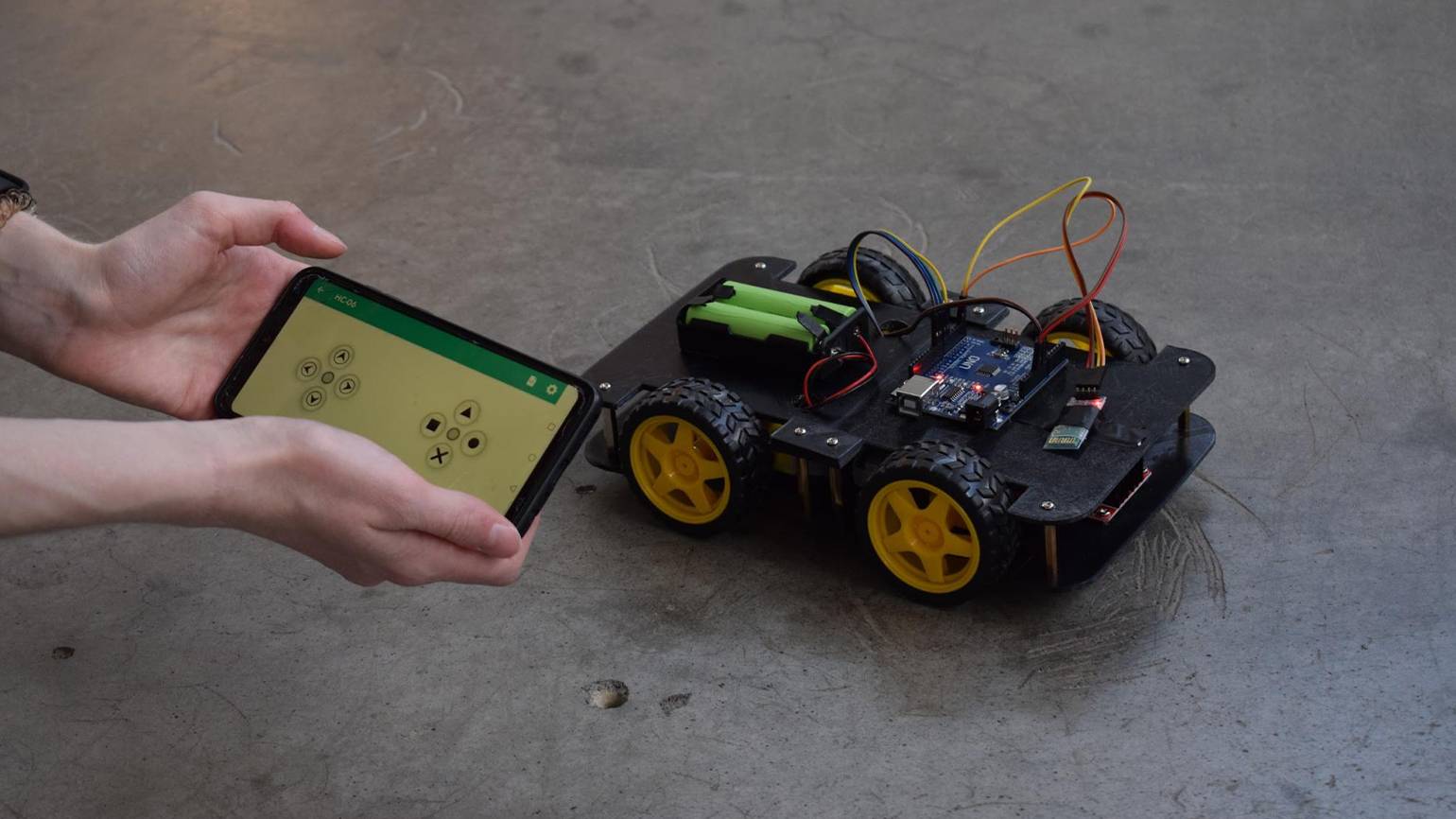
Роботом можно будет управлять прямо с вашего смартфона по Bluetooth. Именно с такого проекта новички часто начинают свой путь в робототехнике.
Это руководство будет состоять из двух частей. В первой части мы соберём саму машинку, а во второй расскажем, как запрограммировать движения и настроить управление роботом со смартфона.
Вот основные шаги нашего туториала:
- Подготовка деталей. Можно использовать детали из готовых наборов или смоделировать собственные и распечатать на 3D-принтере.
- 3D-моделирование*. Если всё же решитесь печатать детали сами, в середине статьи вас ждёт инструкция и готовые модели для печати.
- Сборка. Физически соединим элементы корпуса.
- Подключение электроники. Подключим моторы, проведём питание для робота. В некоторых случаях может понадобиться паяльник, если вы купили «голые» моторы с ещё не припаянными проводами.
- Программирование. Напишем программу для управления роботом. Настроим и «пульт управления» — мобильное приложение Arduino Bluetooth Control.
В первой части гайда мы рассмотрим только первые три этапа.
Для создания робота понадобятся стандартные материалы для сферы робототехники — их можно приобрести в специальных магазинах с товарами для Raspberry Pi и Arduino или на любом маркетплейсе. Чтобы ускорить процесс, приобретите готовый набор для сборки умного автомобиля — например, такие есть на Ozon и AliExpress.
Если у вас уже есть опыт создания подобных проектов, вы можете выполнить задания туториала «со звёздочкой» и дополнительно попрактиковаться в моделировании. В этом случае вам потребуется 3D-принтер.
Теперь пройдёмся по основным компонентам нашего будущего робота.
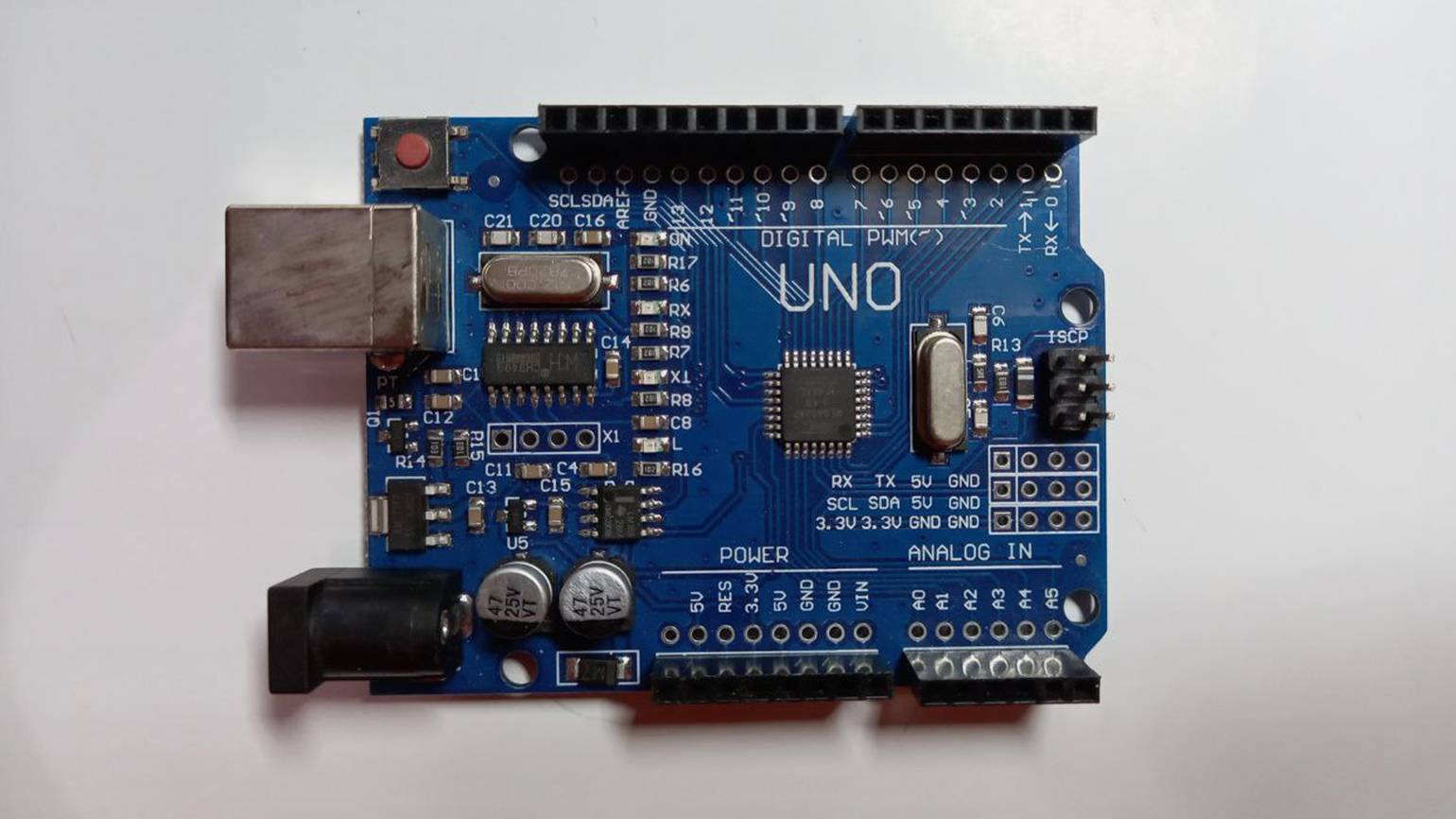
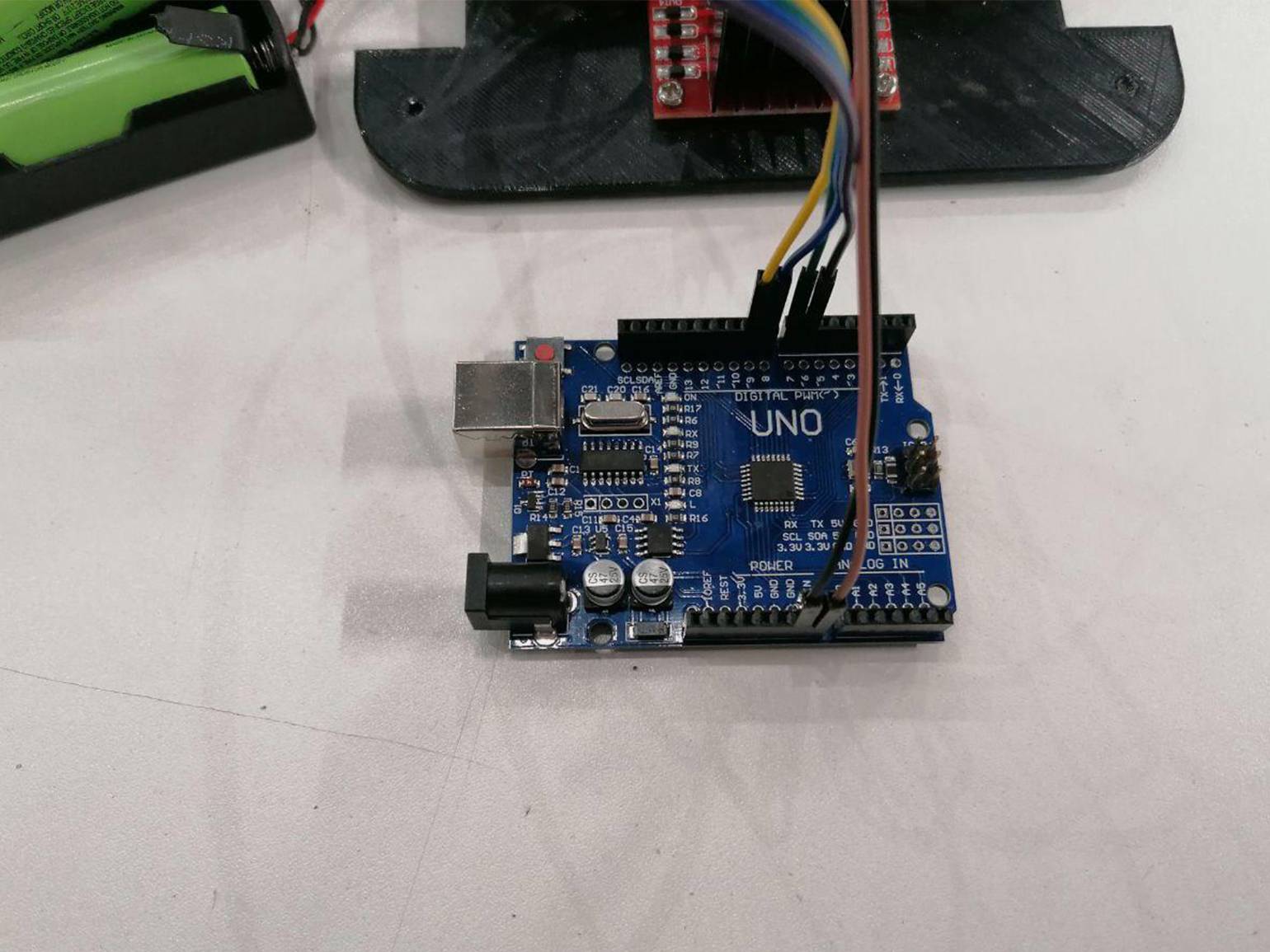
Именно эта плата будет управлять всеми компонентами робота. Мы советуем выбрать самый распространённый микроконтроллер в семействе Arduino — Arduino Uno. Он прост и понятен для новичков, а его функций будет достаточно для реализации любой идеи. К тому же о нём создано огромное количество материалов — их можно использовать для вдохновения или в качестве пошаговой инструкции при создании дальнейших проектов.
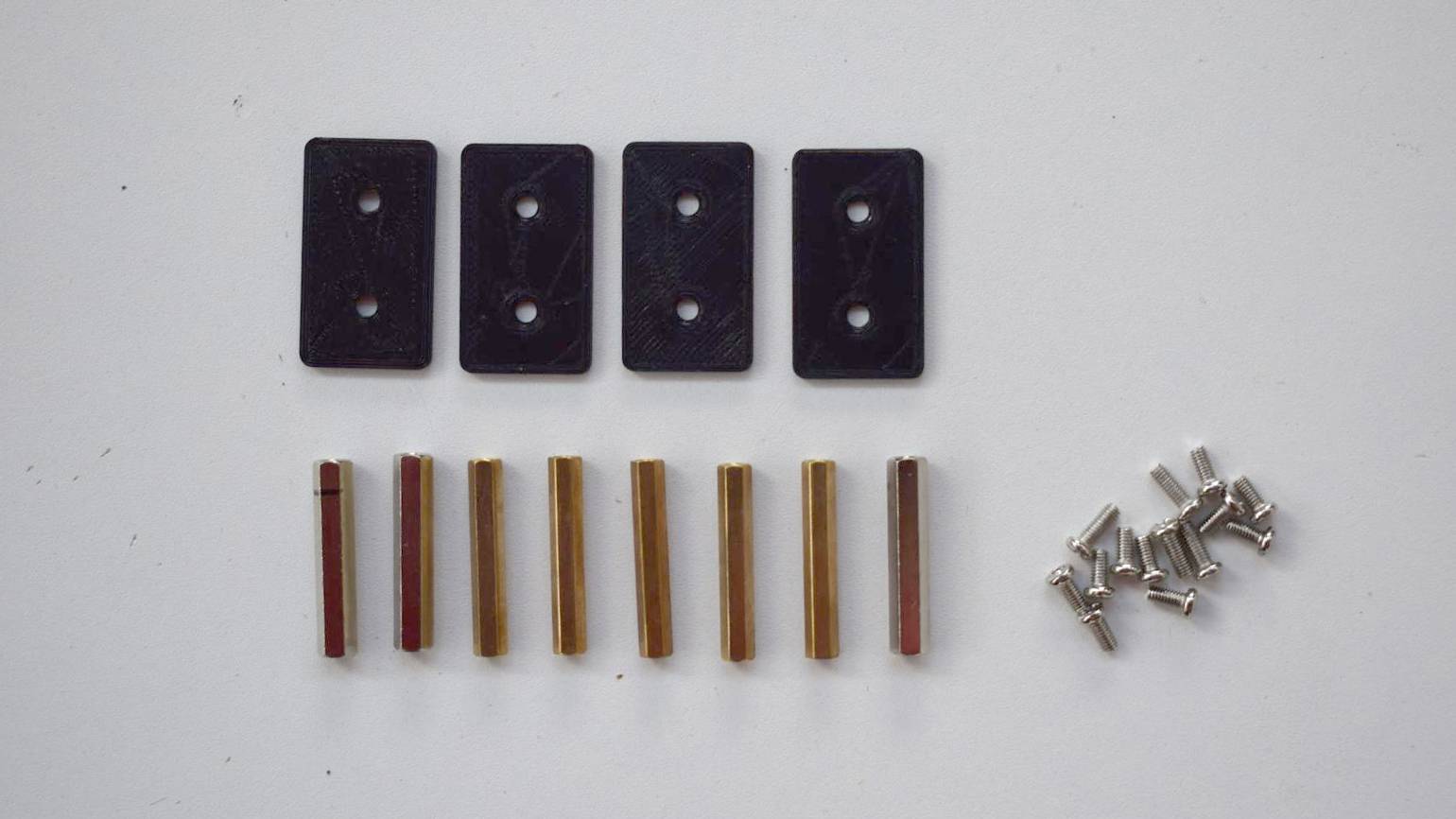
Вот из каких частей будет состоять «скелет» робота:
- Пластины (нижнее основание и верхняя платформа) — основа корпуса. На верхней пластине (крышке) будет закреплён батарейный отсек и плата Arduino Uno. К нижней пластине (основанию) будут прикреплены моторы и драйвер для моторов.

- Соединительные пластины. В нашей модели и нижнее основание, и верхняя платформа сделаны из половинок, соединённых перемычками — соединительными пластинами. Вы же можете использовать две цельные детали.
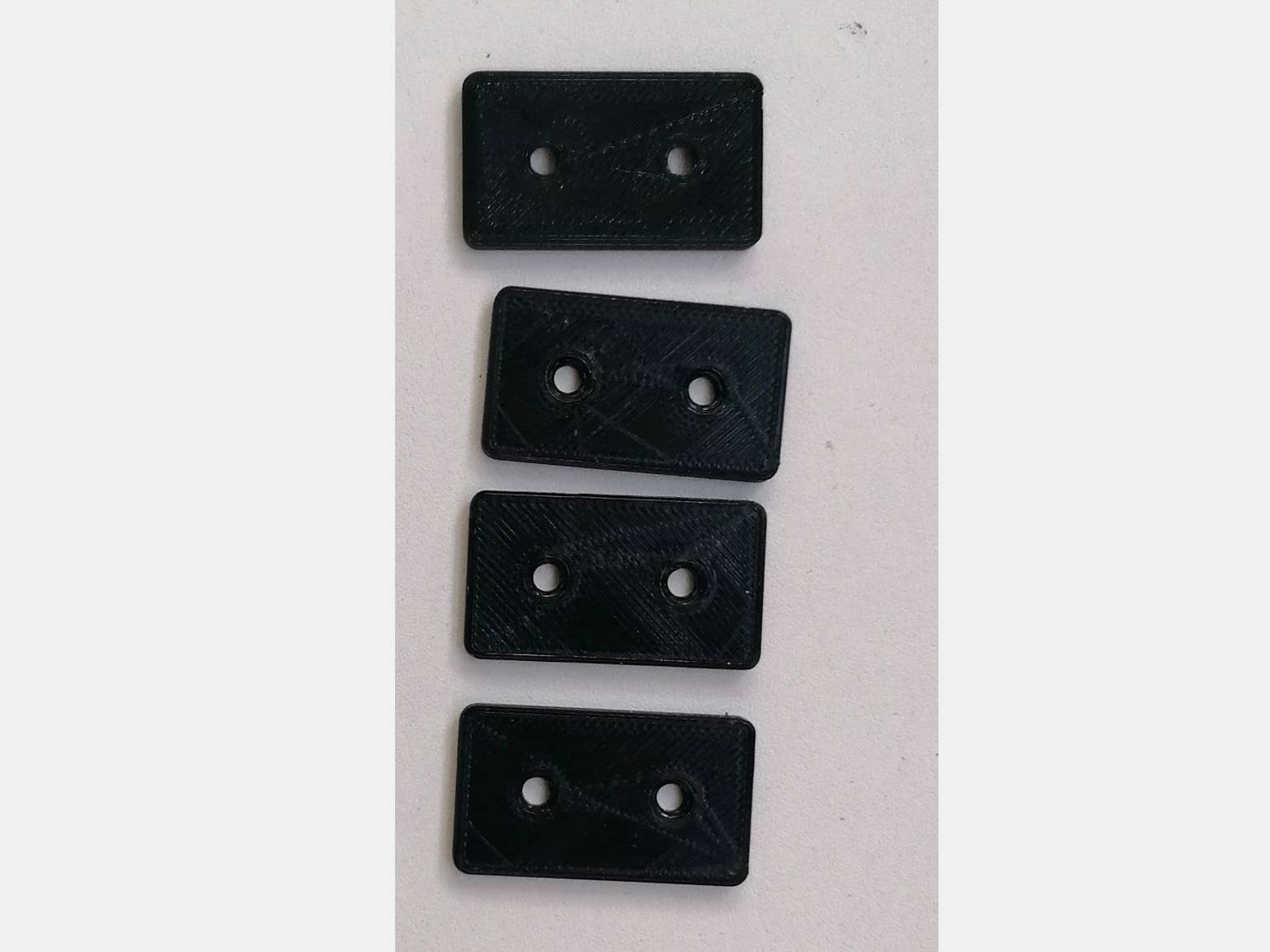
- Кронштейны (стойки-фиксаторы) для моторов — 8 штук.

Если вы используете готовый набор, то, скорее всего, найдёте все нужные детали в комплекте.
Чтобы привести нашего робота в движение, нам понадобится по два мотора на каждую сторону конструкции — всего 4 штуки. Они будут крепиться к нижнему основанию с помощью вертикальных кронштейнов и управлять движением колёс.

Драйвер будет управлять скоростью и направлением движения робота.
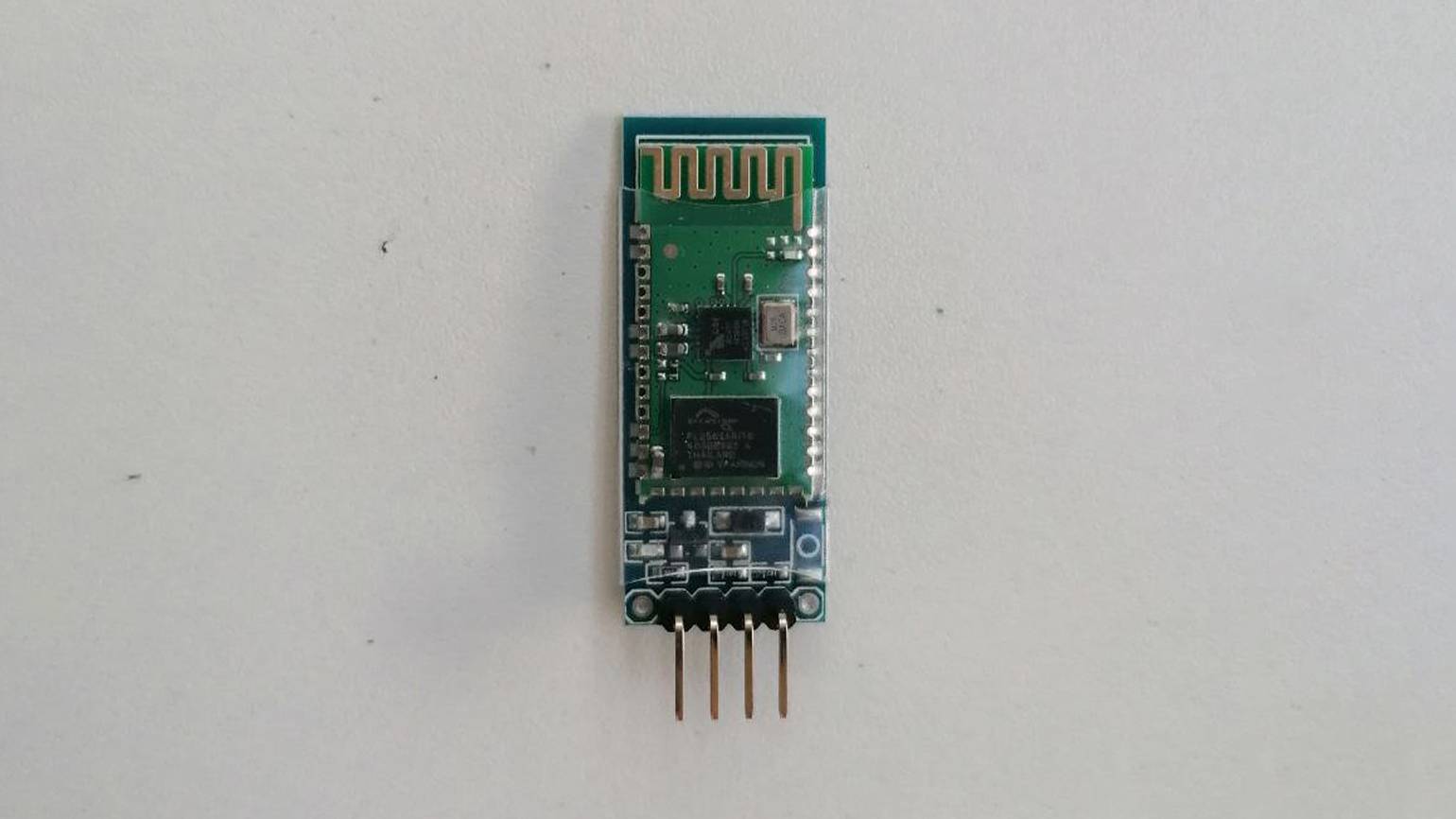
Bluetooth-модуль нужен для беспроводного управления роботом с телефона.
Ну и куда же без них 

- Крепёж: винты, гайки, а также стойки длиной 3 см (8 штук) — они будут соединять верхнюю и нижнюю пластины конструкции.

- Провода, стяжки для проводов.
- Источник питания — две литийионные батареи по 3,7 вольта.
- Держатель для батареи.
Перед началом: если вы не готовы погружаться в нюансы 3D-моделирования и хотите просто распечатать на принтере готовые модели, можете использовать наши.
Если же вы решили спроектировать модель сами, сделать это можно в любом доступном CAD-редакторе, например Fusion 360, Siemens NX, SolidWorks, Onshape.
При подготовке этого туториала мы использовали программу Onshape. Для работы с ней не нужно ничего устанавливать на компьютер, можно работать прямо в браузере. Эта программа удобна для создания простых деталей, а также имеет встроенную систему контроля версий, что позволит откатиться к предыдущей версии в случае, если вы допустили ошибку. Если же вы планируете серьёзно заниматься прототипированием, рекомендуем освоить работу и в полноценных десктопных CAD-программах.
Теперь приступим к моделированию деталей. Габариты робота сделаем такими:
- длина — 54 см,
- ширина — 22 см,
- высота — 3 см.
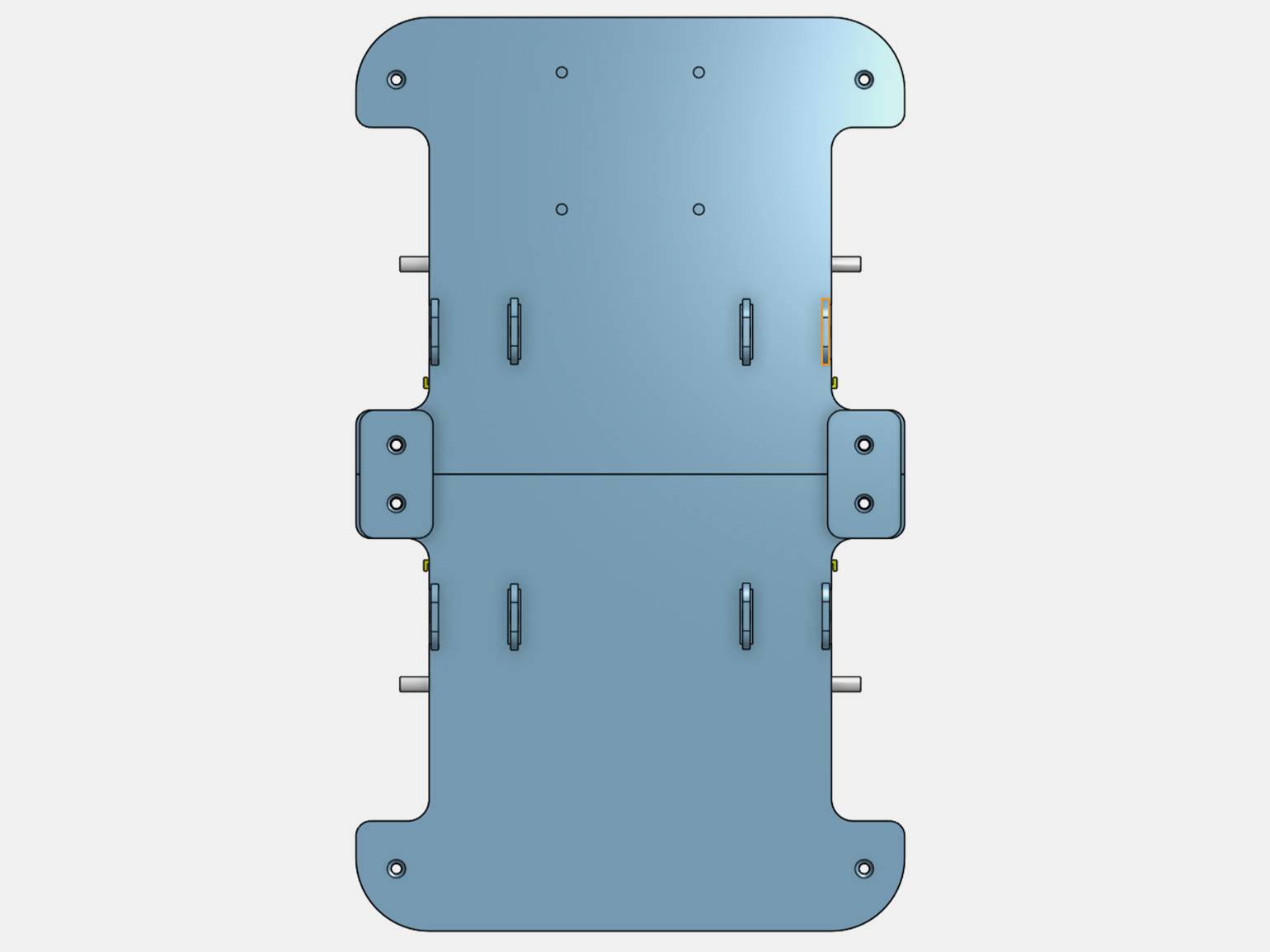
Нам понадобятся пластины для верхнего и нижнего основания нашего робота. Мы заранее учли ограничения принтера — размеры печатного стола не позволили бы распечатать цельную пластину, поэтому мы изначально смоделировали две пары полупластин. Вы можете сделать нижнее и верхнее основания цельными.
Две пластины будут фиксироваться вертикальными металлическими стойками, поэтому не забудьте предусмотреть отверстия для винтов по краям пластин. На нижней пластине нужно предусмотреть отверстия для крепления драйвера и вставки кронштейнов.
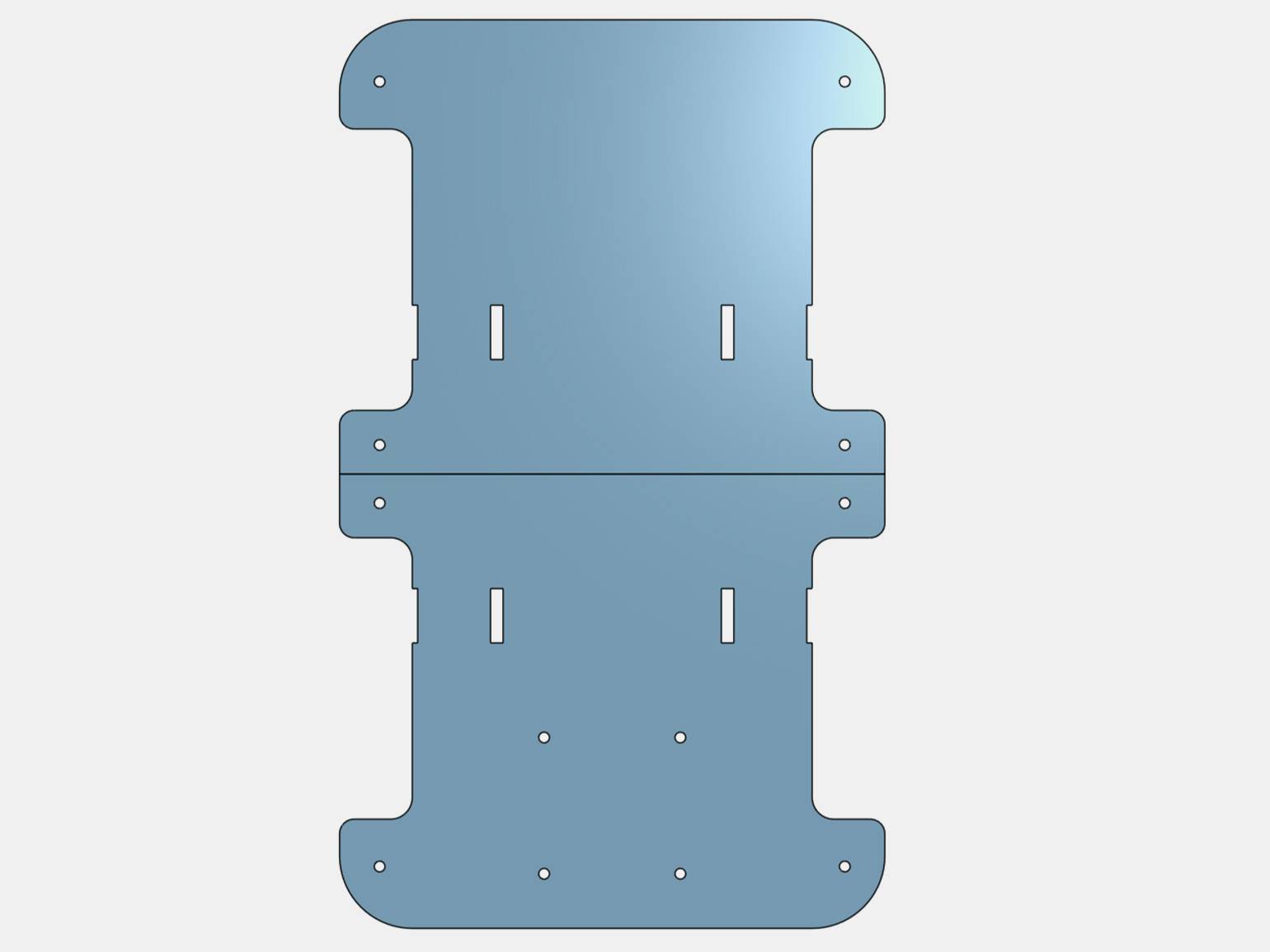
Скриншот: личный архив Екатерины Можеговой
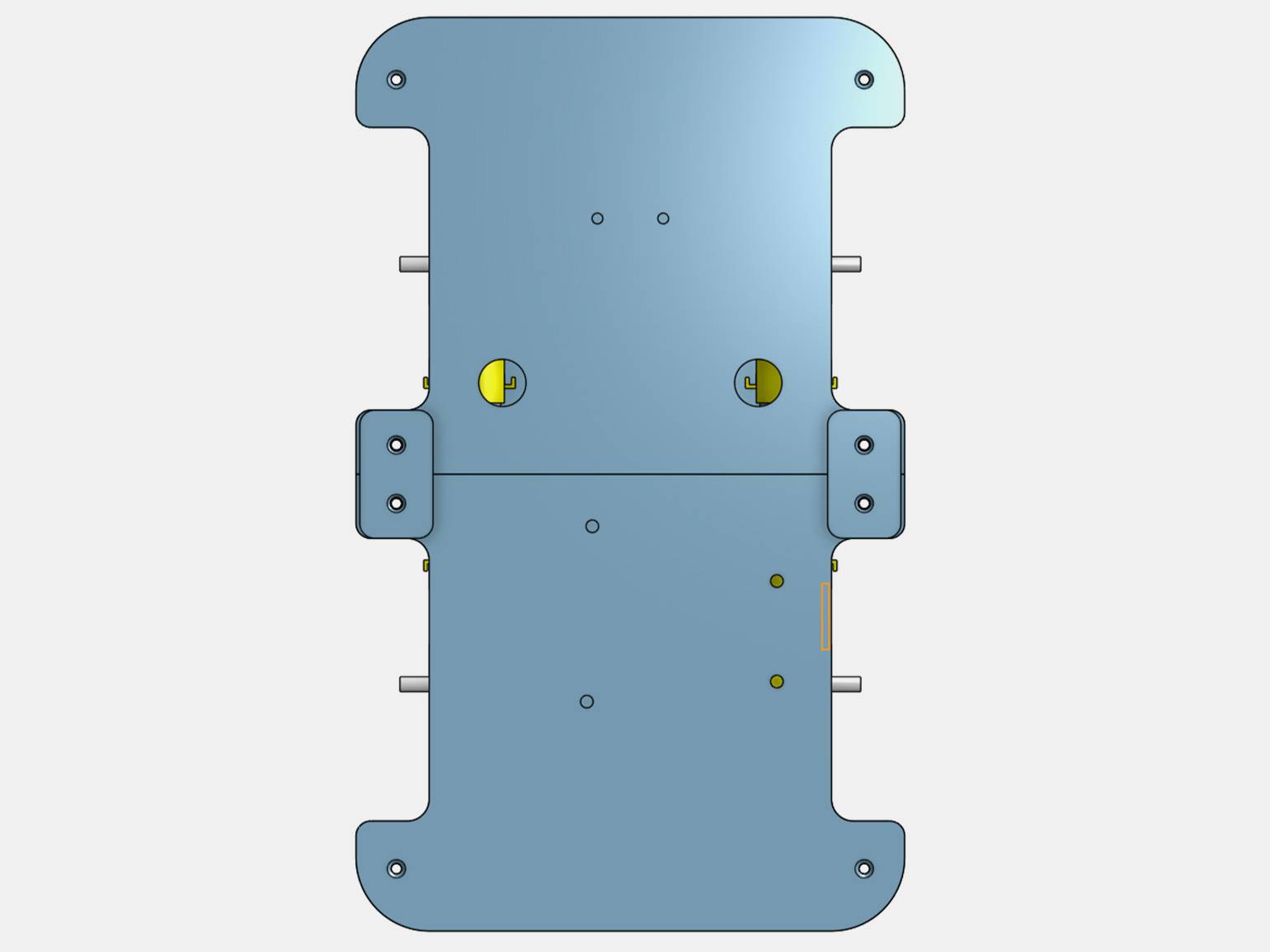
При моделировании верхней пластины важно учесть отверстия для Arduino Uno, батарейного отсека, а также отверстия для проведения проводов.
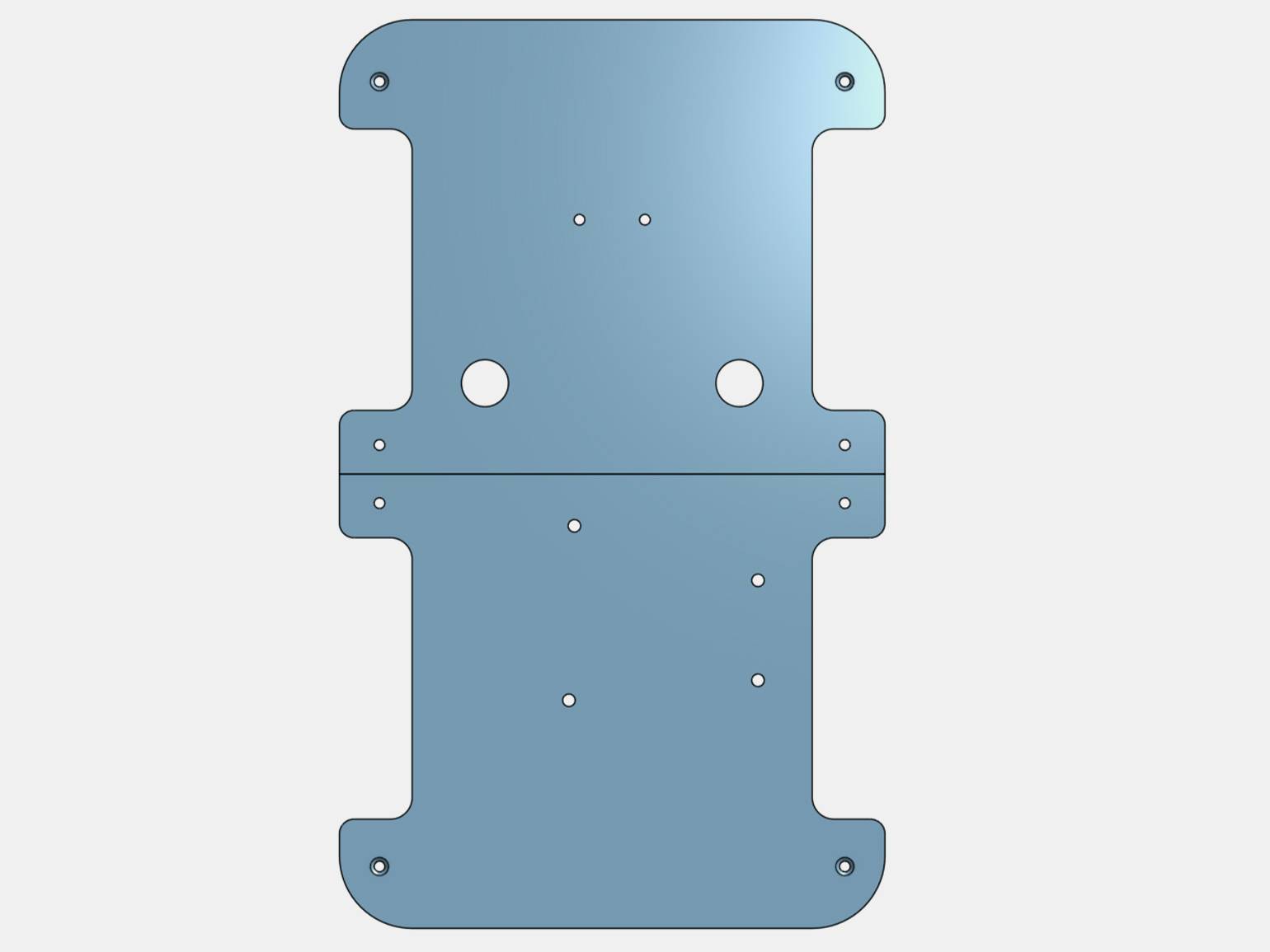
Скриншот: личный архив Екатерины Можеговой
Теперь нужно смоделировать кронштейны и соединительные пластинки. Внешний вид и размеры не принципиальны, главное — учесть отверстия для креплений и замеренное расстояние между ними (штангенциркуль или просто линейка вам в помощь ?).
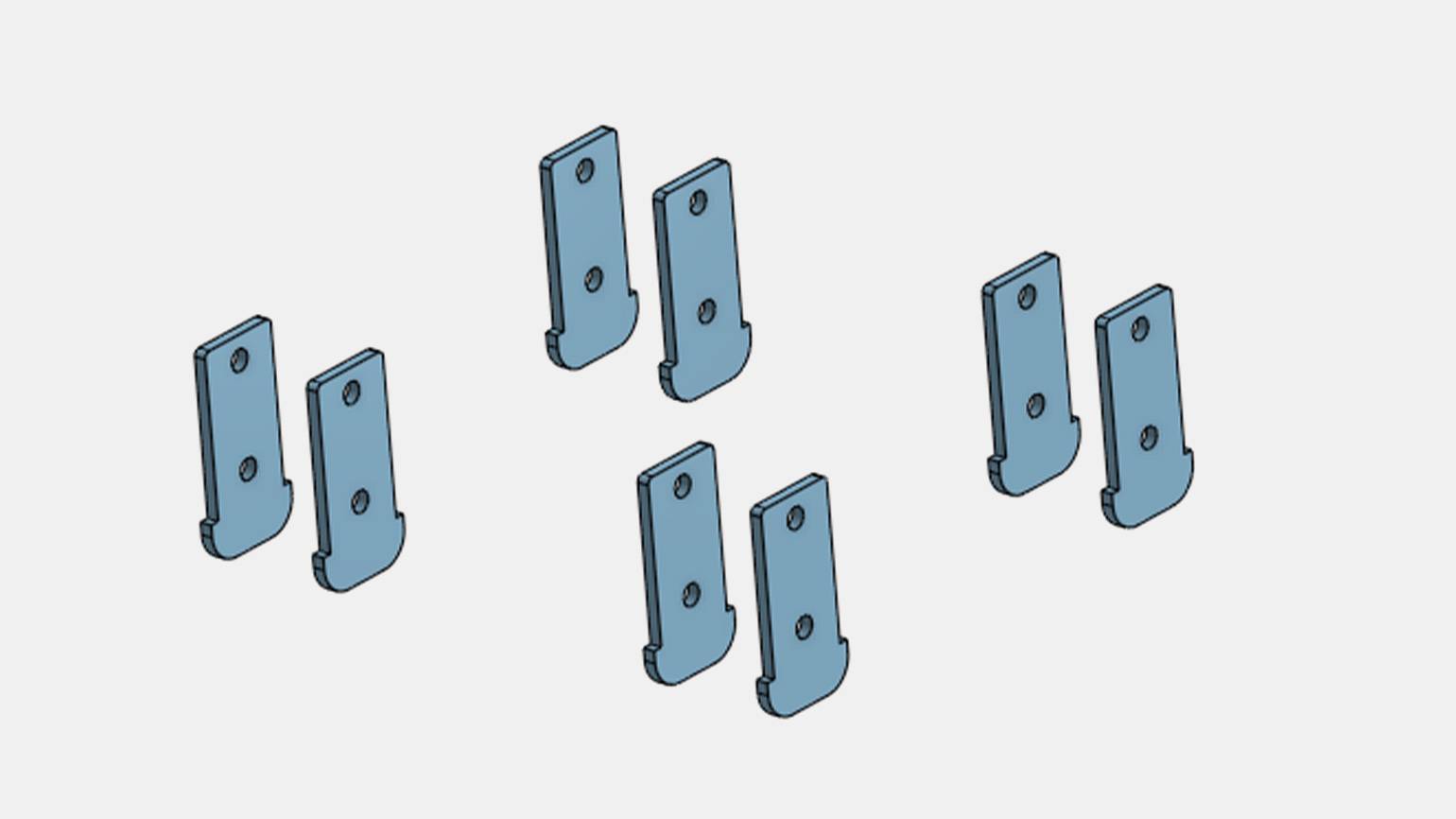
Скриншот: личный архив Екатерины Можеговой
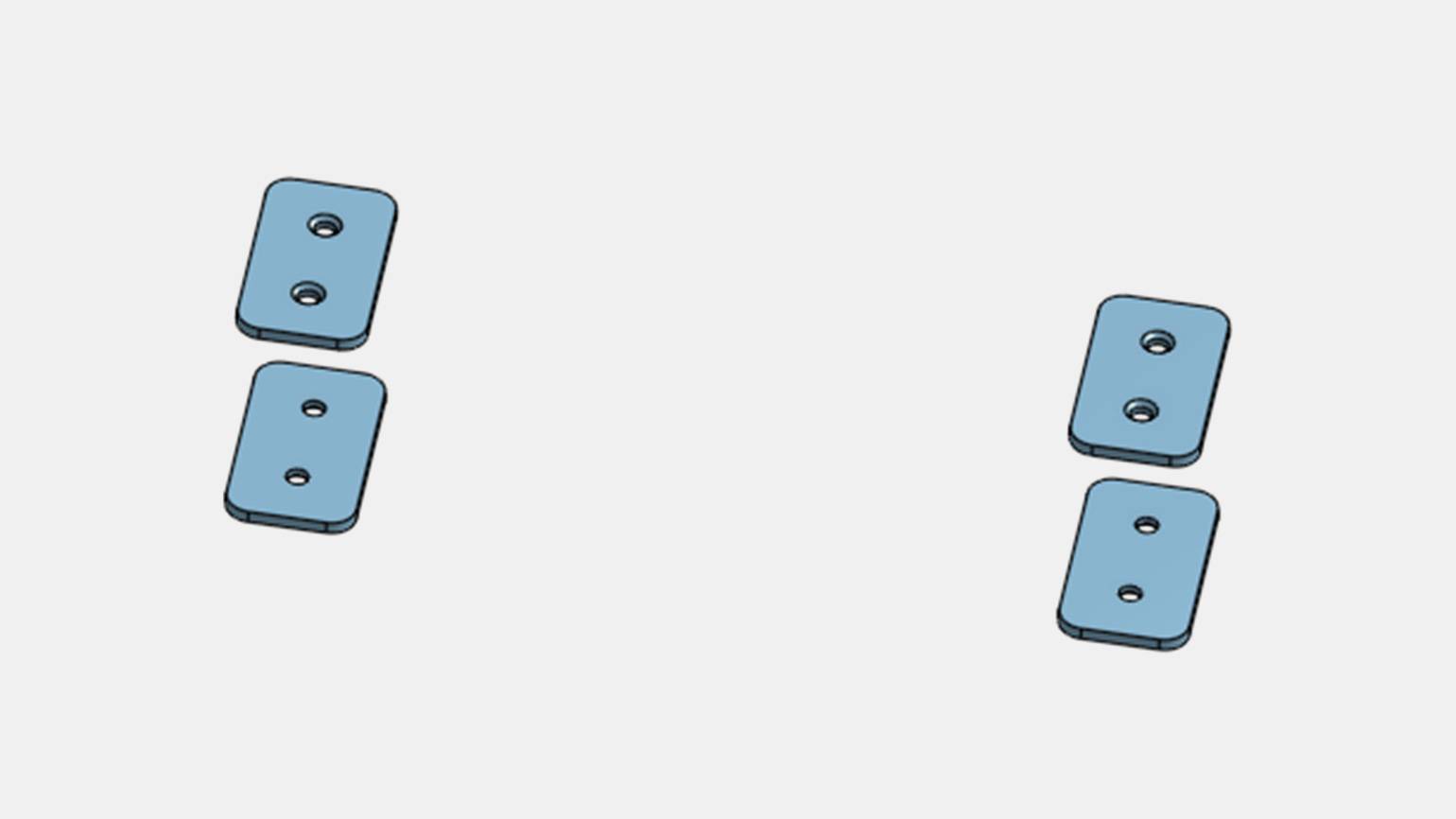
Скриншот: личный архив Екатерины Можеговой
Итак, корпус робота в сборке вместе с моторами будет выглядеть примерно так (листайте, чтобы посмотреть в разных проекциях):
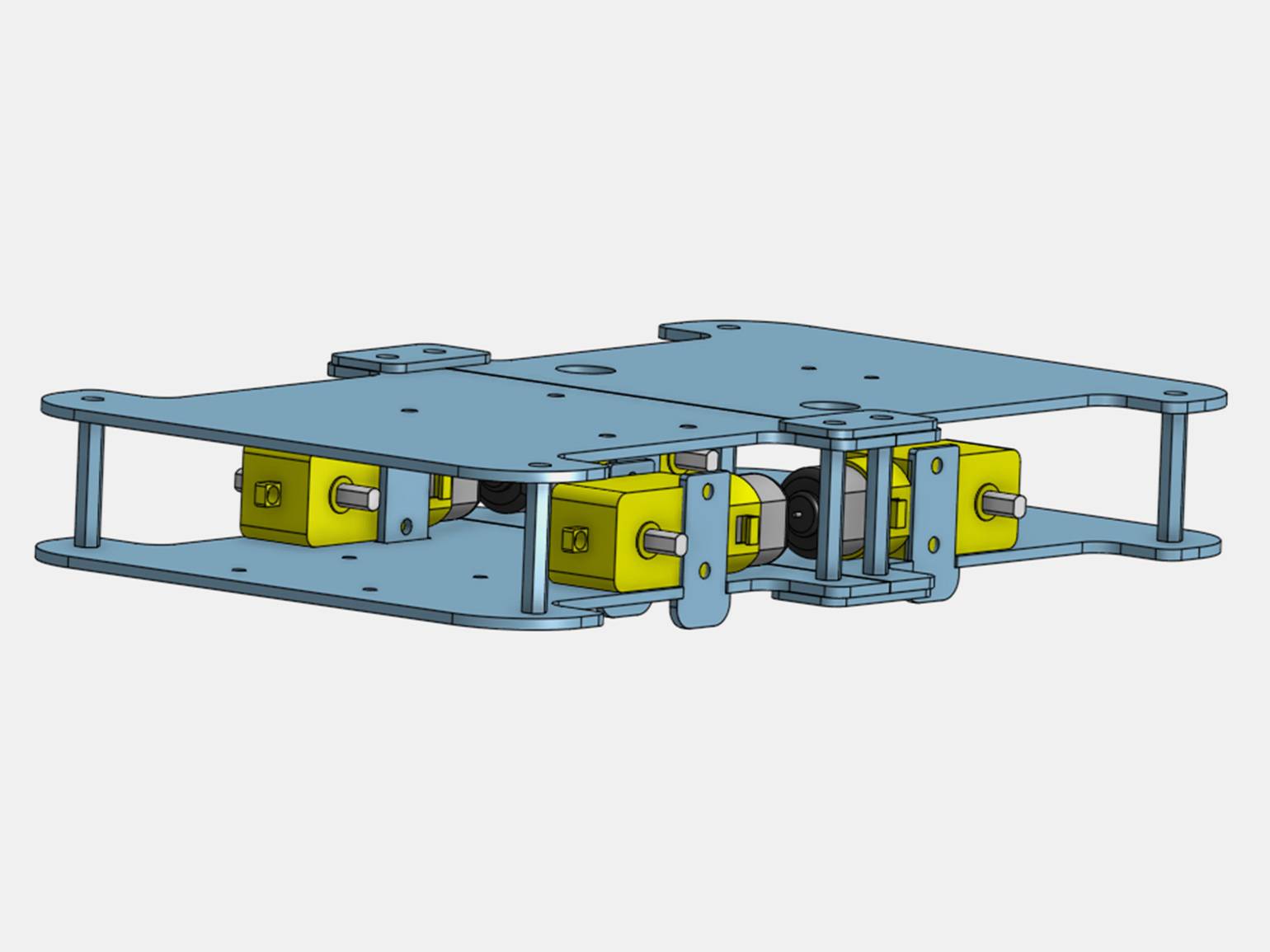
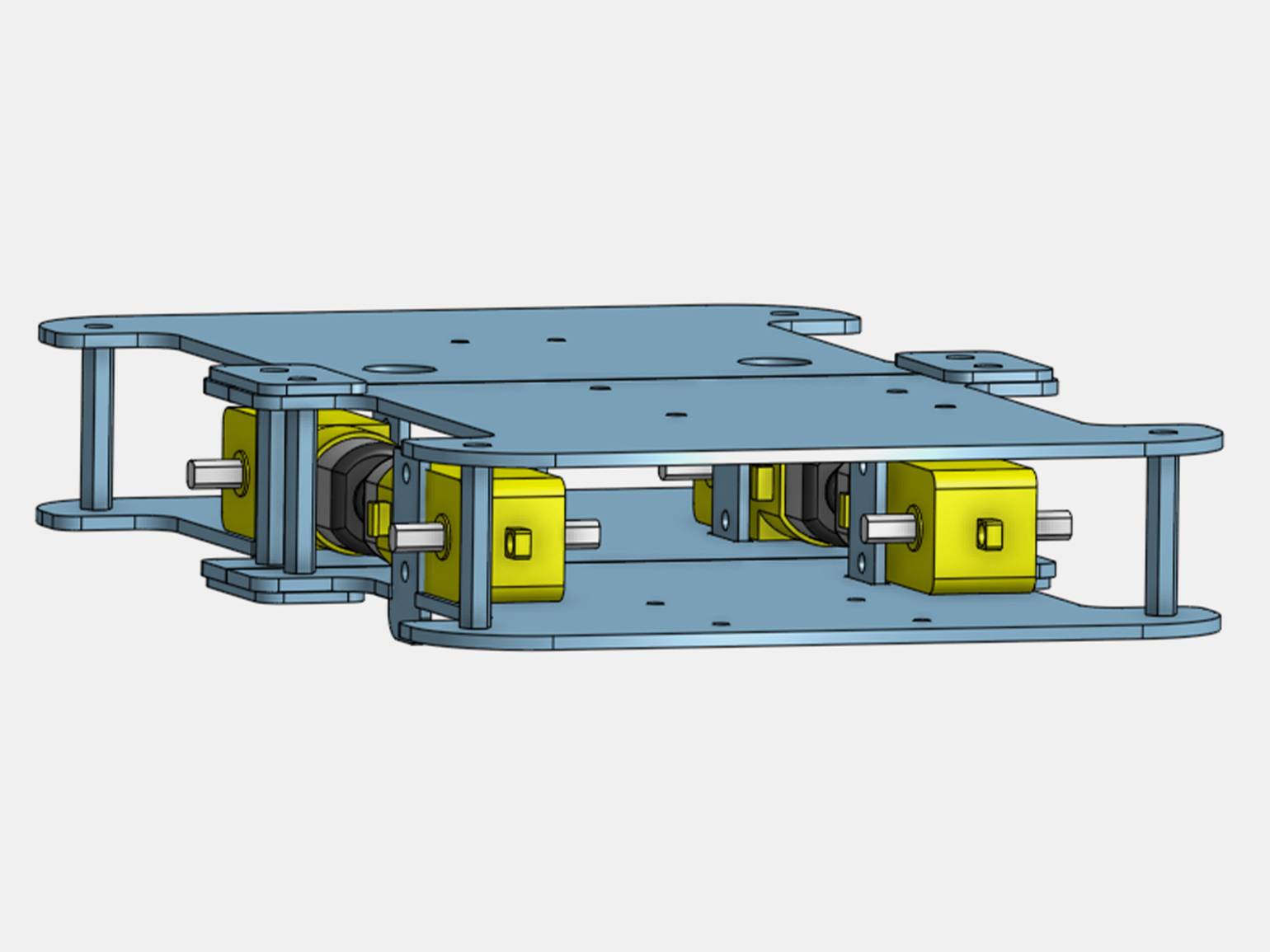
Скриншот: личный архив Екатерины Можеговой
Скриншот: личный архив Екатерины Можеговой
Готовую 3D-модель нужно экспортировать в формате STL, а затем сгенерировать GCODE — это формат файлов, который поддерживает большинство 3D-принтеров. Теперь всё должно быть готово к печати.
Перед тем как начать, давайте убедимся, что у нас есть всё необходимое, — чтобы в процессе сборки не пришлось дополнительно что-то заказывать.
Вот полный список материалов:
- детали корпуса:
- верхняя пластина;
- нижняя пластина;
- соединительные пластины;
- вертикальные кронштейны для моторов;
- моторы с редукторами;
- колёса;
- плата Arduino Uno;
- драйвер для моторов;
- батарейный отсек;
- стойки, винты и гайки;
- провода и соединения;
- зажимы и стяжки для проводов;
- паяльник — чтобы соединять провода с контактами.
А теперь переходим к сборке робота.
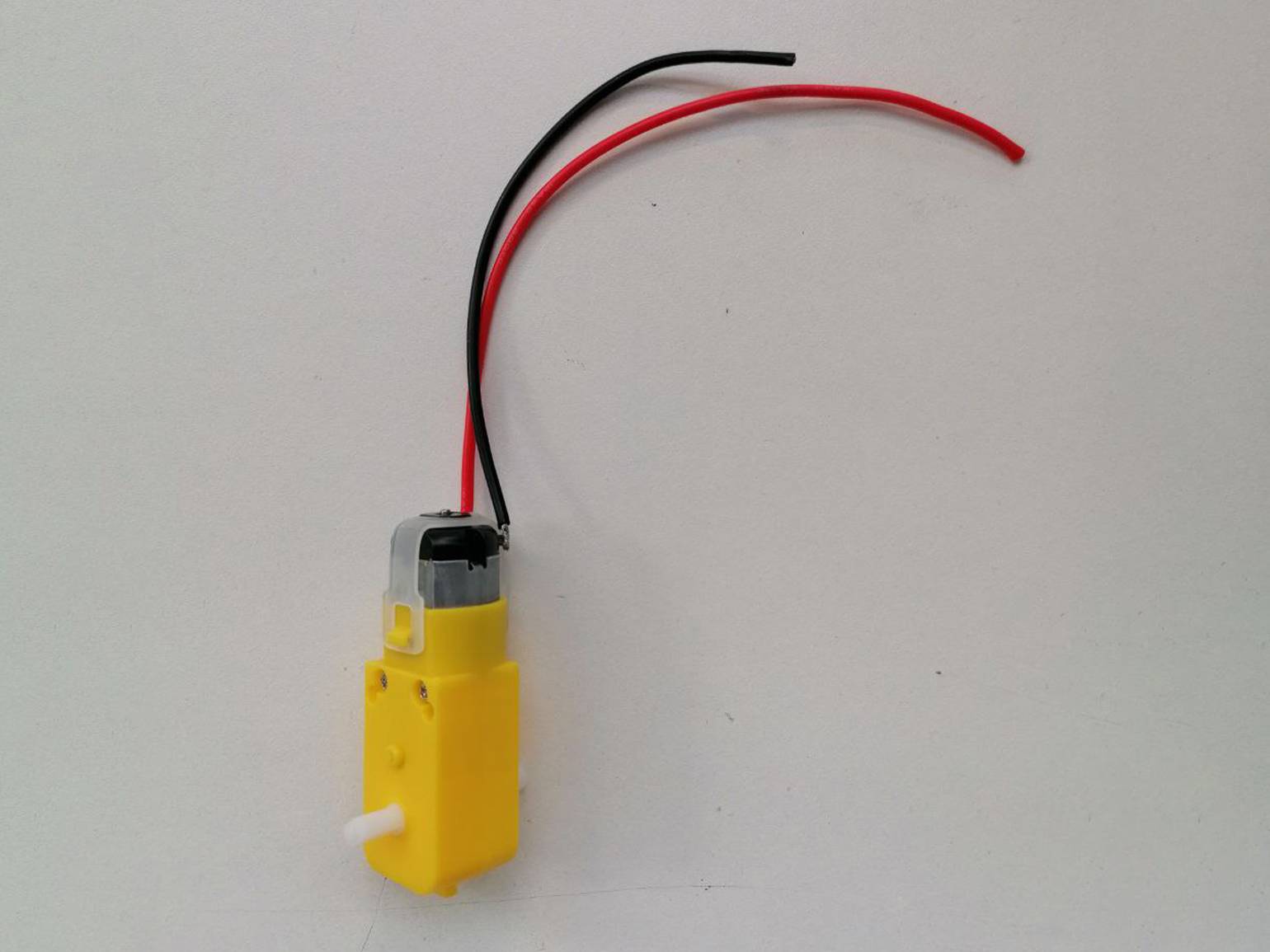
Шаг 1. Для начала нужно припаять провода к моторам.
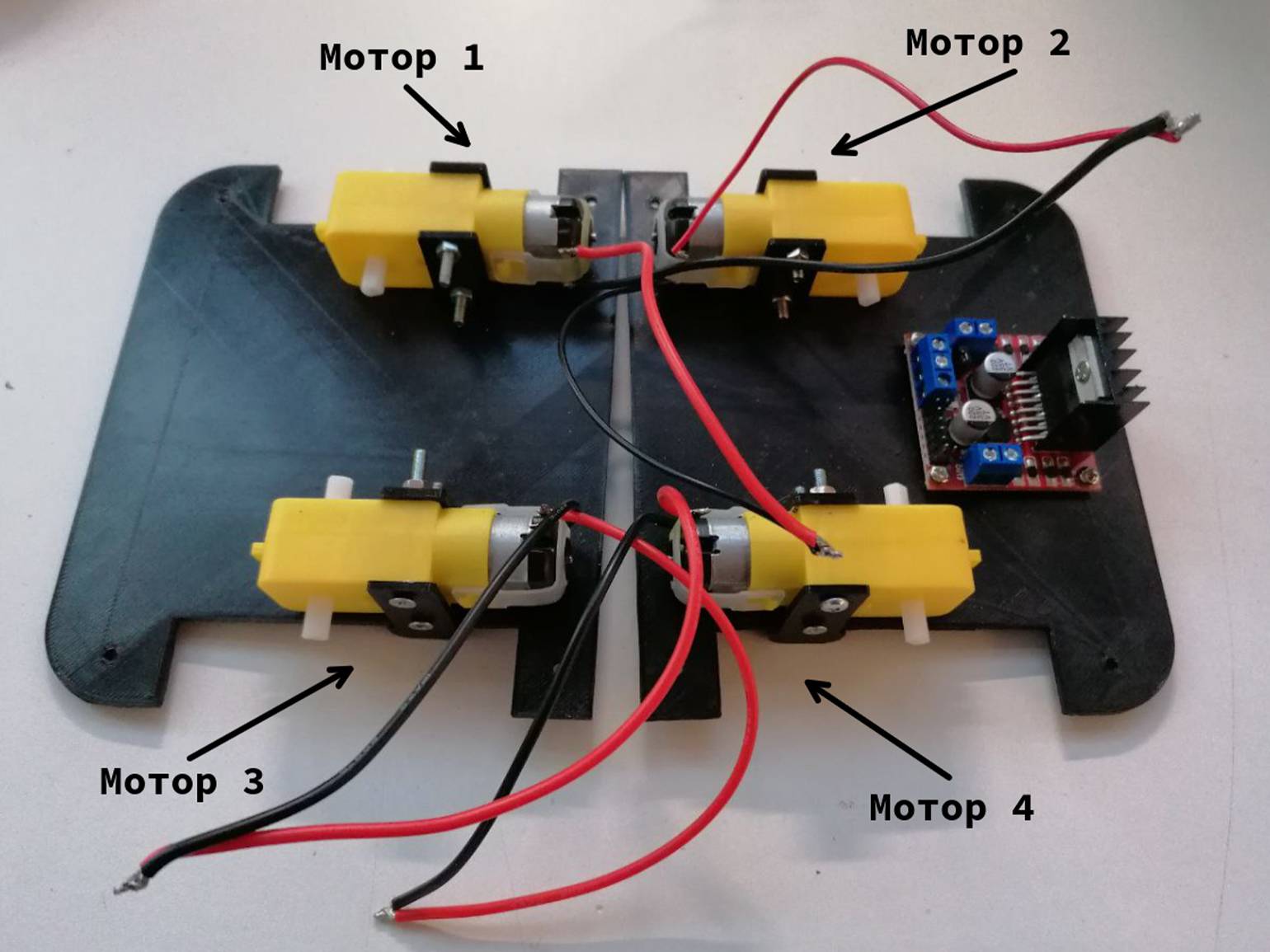
Шаг 2. Затем закрепим моторы к платформе с помощью фиксаторов. Также закрепим драйвер. Спаяем провода, соединённые попарно, как показано на иллюстрации.
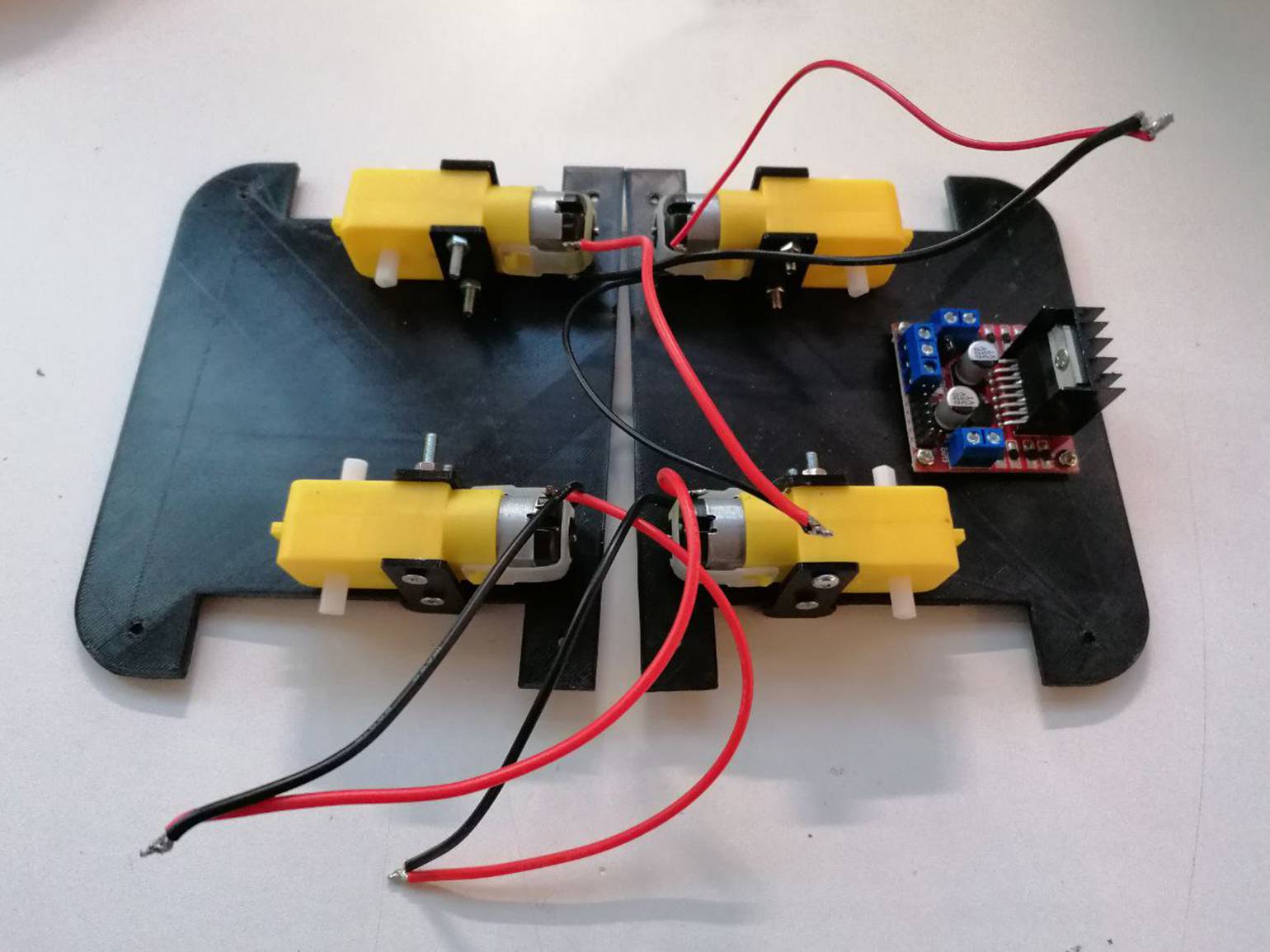
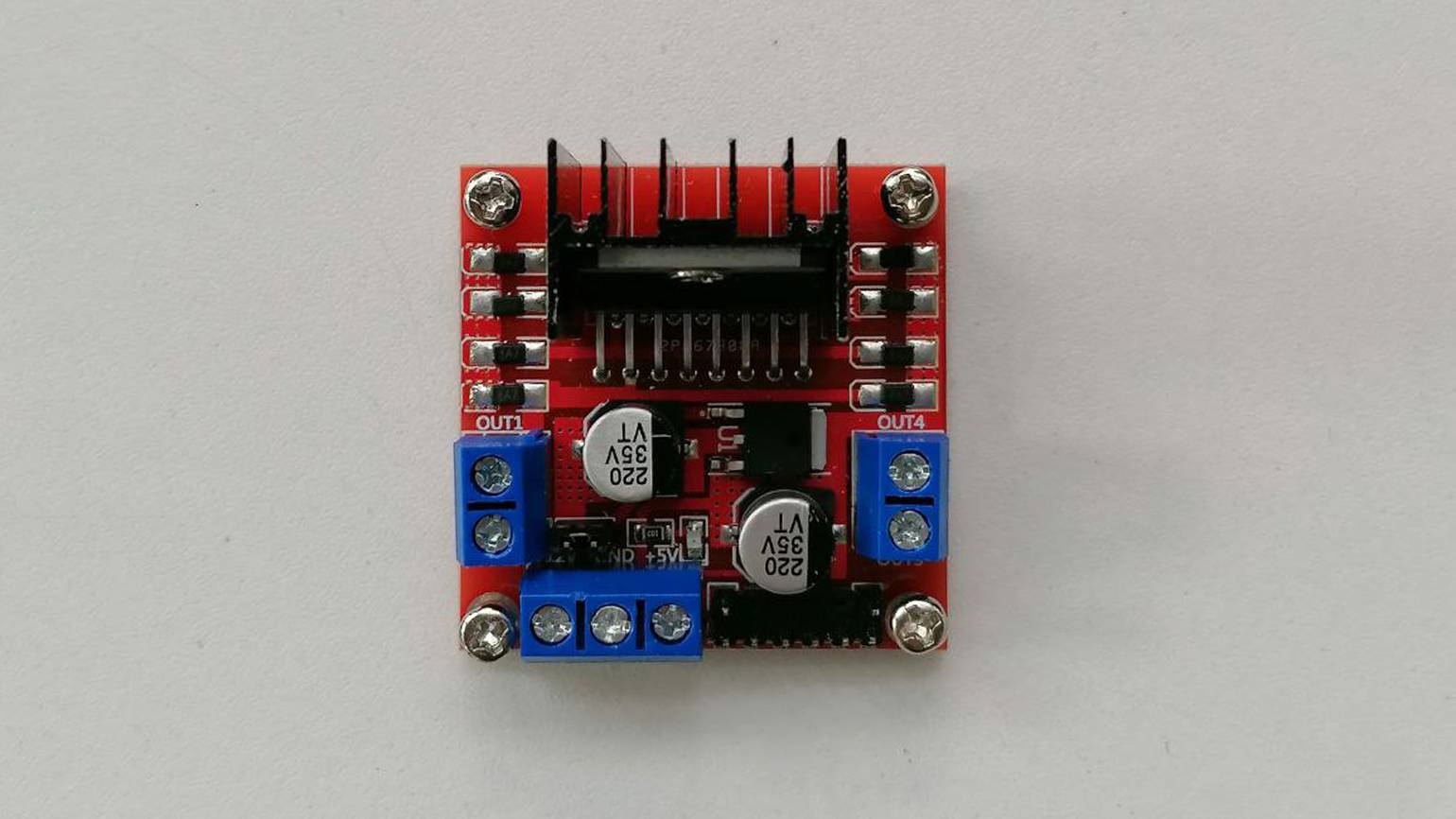
Драйвер нам необходим для предотвращения перегрузки Arduino, так как моторы требуют более высокого напряжения, чем то, которое может поддерживать плата. А ещё драйвер помогает управлять скоростью и направлением движения мотора.
Используемый нами модуль L298N имеет два выхода для подключения моторов, что позволяет управлять двумя моторами напрямую. Однако к нему мы можем подключить и четыре мотора так, что каждый из двух каналов драйвера будет управлять двумя моторами одновременно.
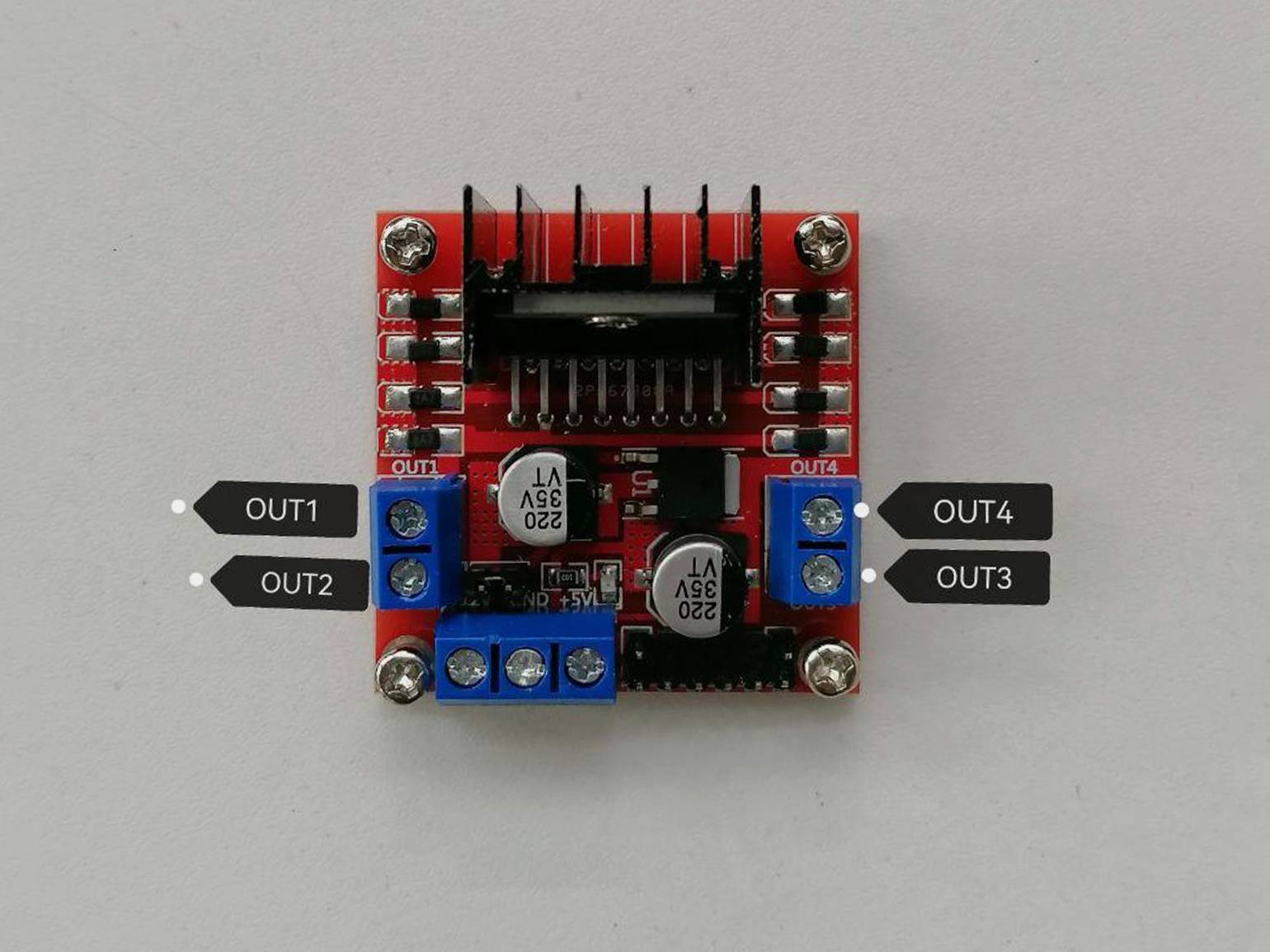
Фото: личный архив Екатерины Можеговой
Для удобства подключения пронумеруем каждый мотор:
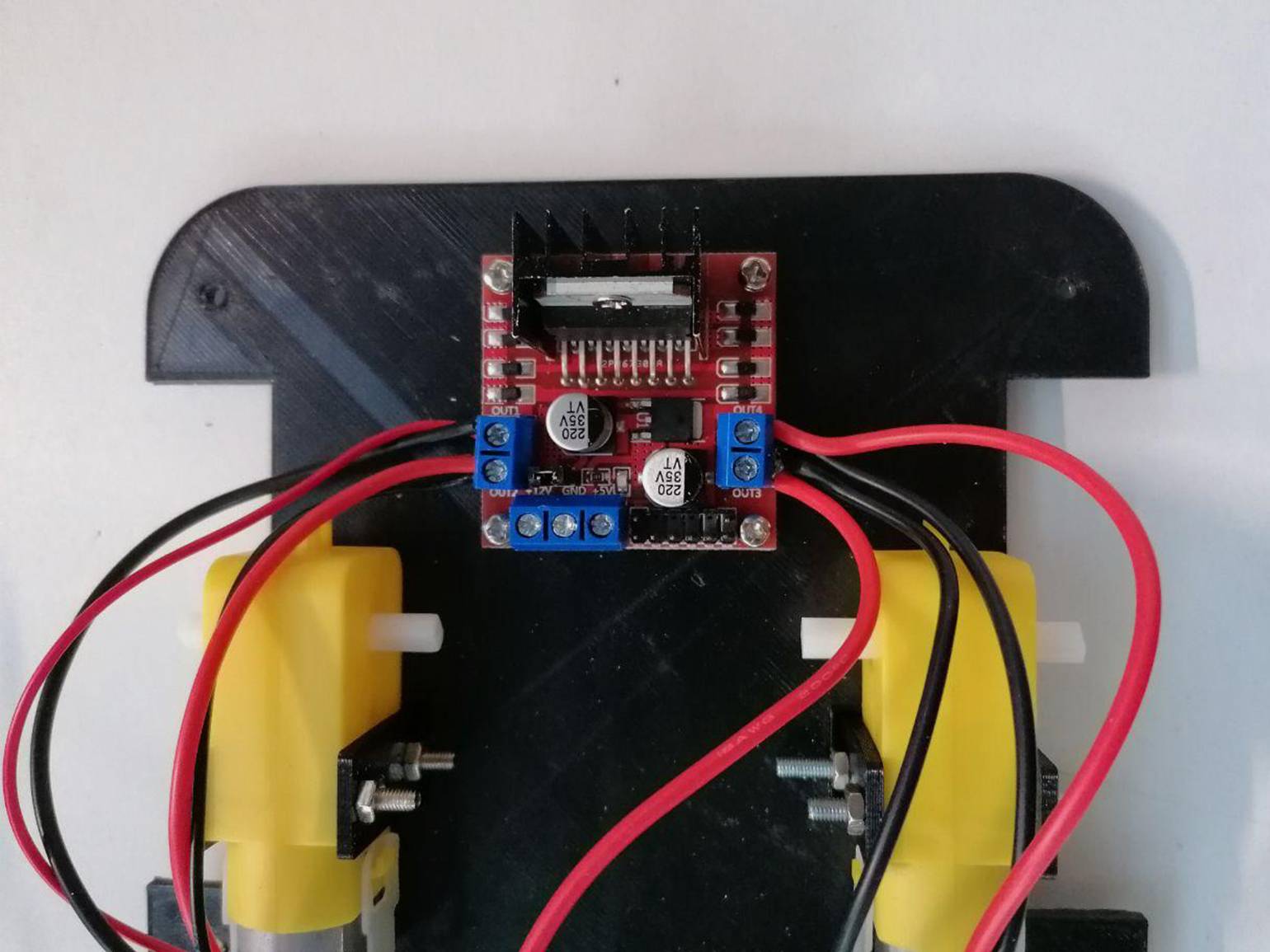
Шаг 4. Подключим выводы моторов к выводам драйвера в следующем порядке.
Канал A (разъёмы OUT1, OUT2):
- первый мотор — к контактам OUT1 и OUT2;
- второй мотор — к контактам OUT1 и OUT2.
Получится, что один провод мотора подключён к контакту OUT1, а другой — к контакту OUT2.
Канал B (разъёмы OUT3, OUT4):
- третий мотор — к контактам OUT3 и OUT4;
- четвёртый мотор — к контактам OUT3 и OUT4.
Аналогично: один провод мотора подключён к контакту OUT3, а другой — к контакту OUT4.
Шаг 5. Подключаем питание. Напомним, что в нашем случае это две аккумуляторные батарейки по 3,7 вольта. Положительный вывод источника подключим к драйверу (вход +12V на драйвере). Драйвер может работать с напряжением от 5 вольт до 35 вольт, так что 7,4 вольта подходит.
Шаг 6. Подключим отрицательный вывод источника питания к GND на драйвере L298N.
Самое время имплантировать «мозг» нашему роботу.
Шаг 7. Подключим GND Arduino к GND драйвера. Подадим питание на логику драйвера (контакт 5V) от микроконтроллера.
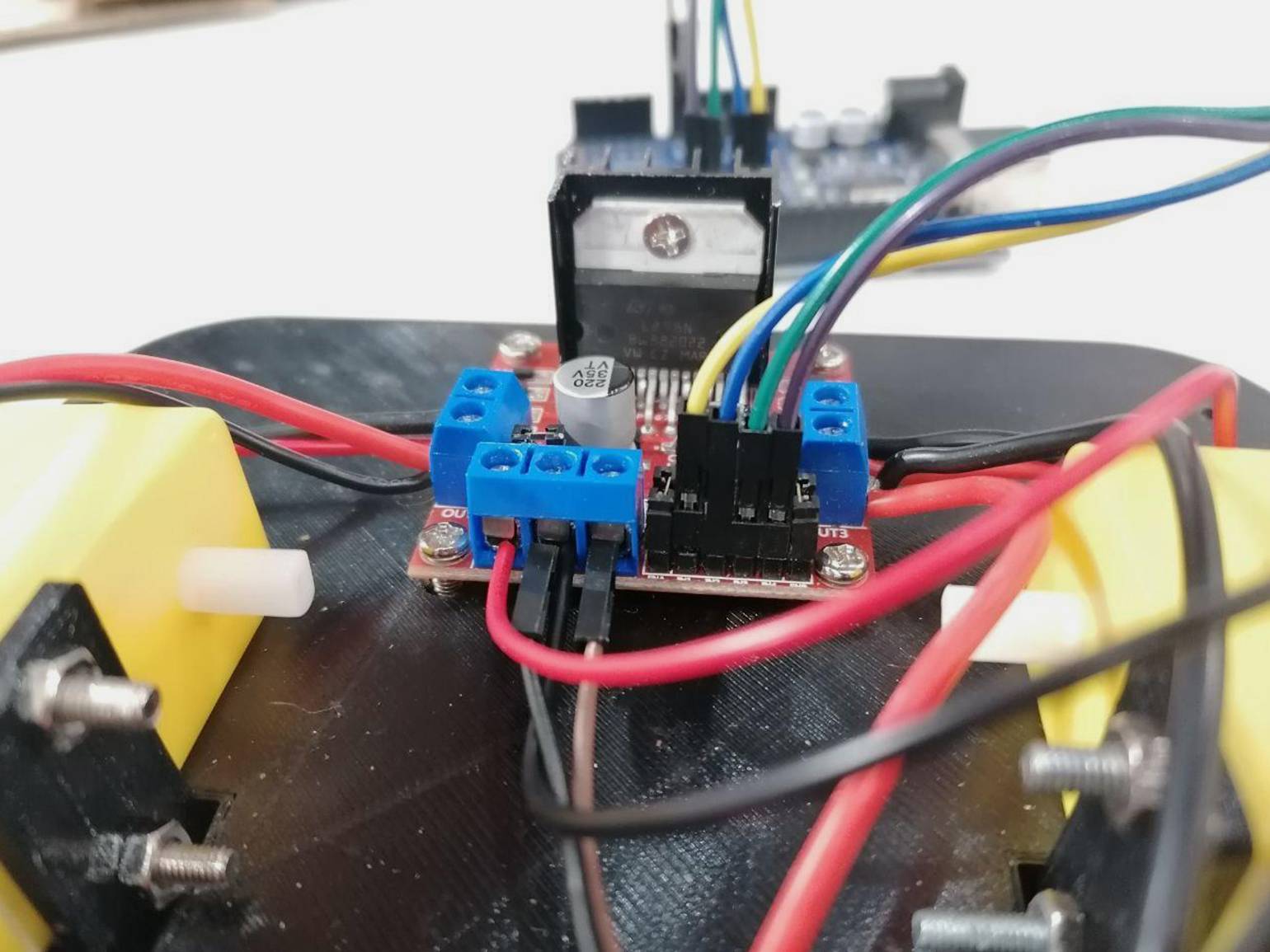
Важный момент: модуль L298N обычно поставляется с перемычками, которые обеспечивают вращение моторов на полной скорости. Если их убрать, можно будет управлять скоростью моторов программно. Мы оставим перемычки на месте.
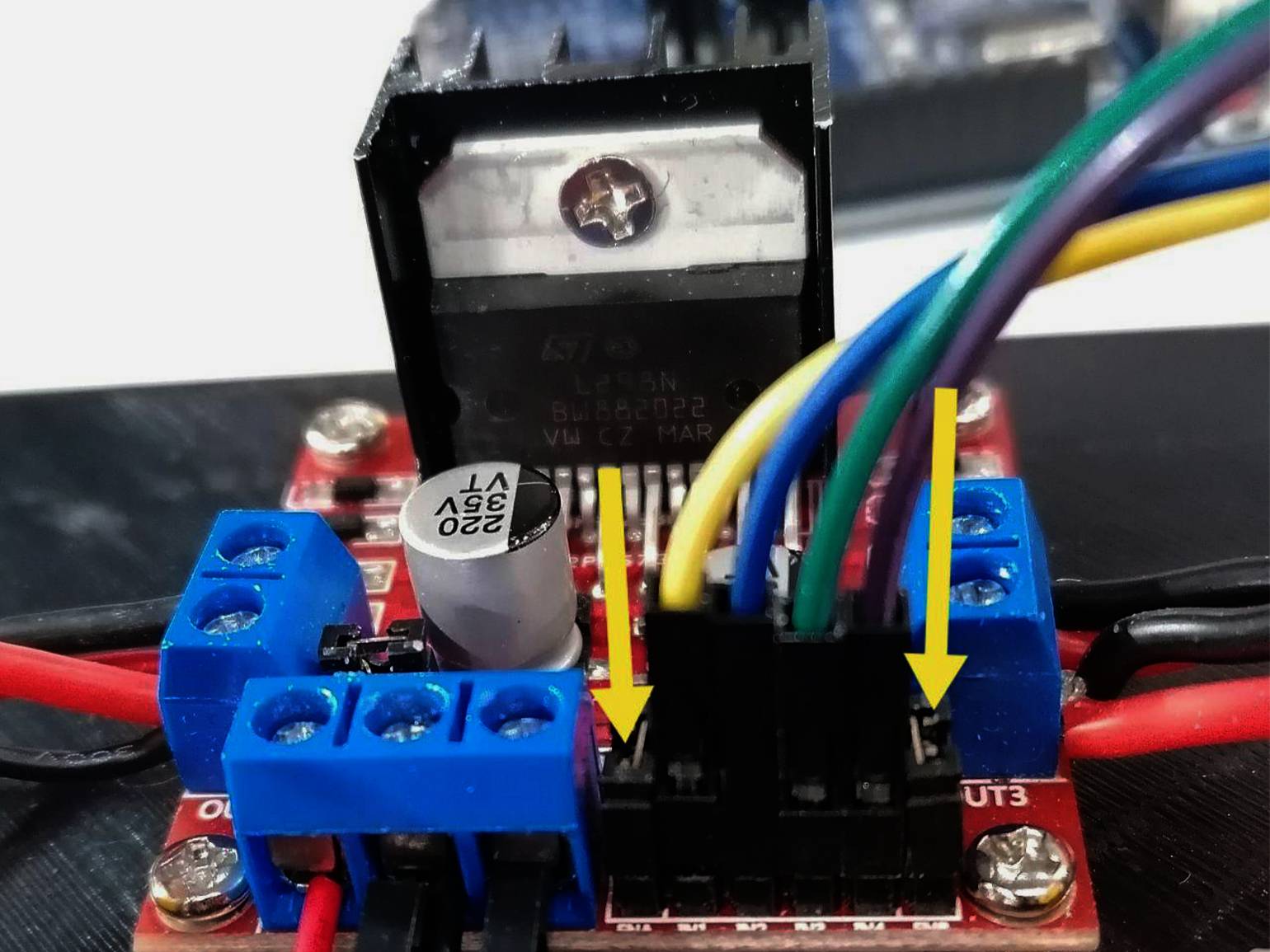
Шаг 8. Подключим провода к контактам управления двигателями для дальнейшего подключения к Arduino.
Попробуйте подключить моторы к источнику питания, чтобы проверить, в какие стороны они вращаются. Если моторы вращаются не в нужном направлении, поменяйте их подключение к драйверу.
Шаг 9. Присоединим контакты моторов к пинам 6–9 Arduino. Затем подключим «землю» от выводов GND и 5V драйвера к GND, 5V на Arduino соответственно.
Шаг 10. Подключаем Bluetooth-модуль.
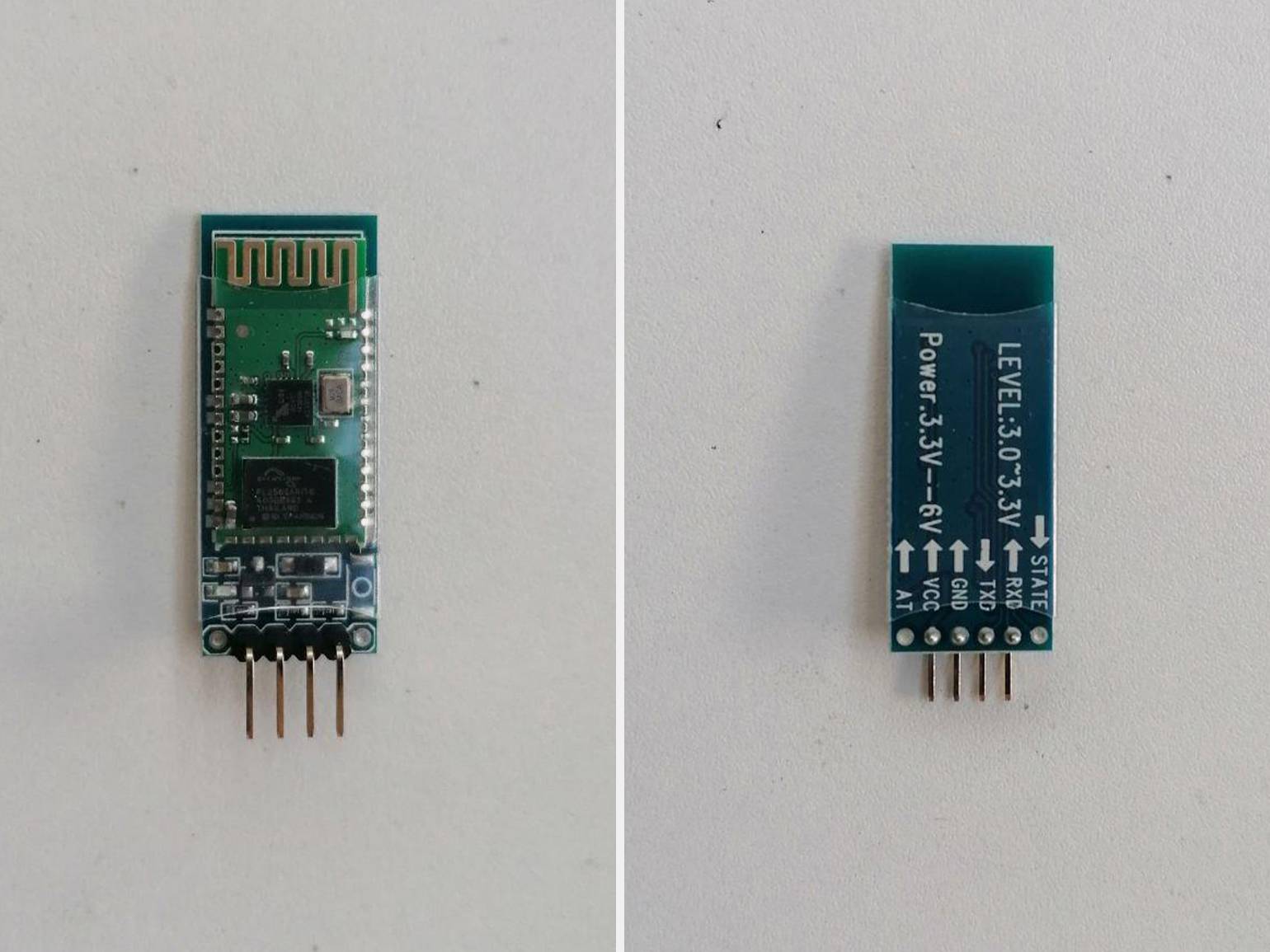
Bluetooth-модуль нужно подключить к последовательным портам ввода/вывода 0 (RX) и 1 (TX). RXD и TXD Bluetooth-модуля подключим к TX- и RX-порту Arduino соответственно (они так и подписаны на плате). Подключим синезубый модуль к питанию от Arduino: соединим VCC и GND Bluetooth-модуля с питанием (5V) и «землёй» (GND) Arduino соответственно.
Важно!
Перед загрузкой кода необходимо будет отключить Bluetooth-модуль от Arduino, а затем подключить обратно. Это связано с тем, что порты TX, RX Arduino используются также для загрузки кода с компьютера на микроконтроллер, то есть порт уже будет занят и Bluetooth-модуль не сможет «достучаться» до него.
Теперь дело за малым: осталось соединить верхнюю и нижнюю части робота. Для этого нам понадобятся соединительные пластины, стойки и винты.
Шаг 11. Прикрепим верхнюю часть платформы к нижней при помощи стоек. Соединим части крышки и основания соединительными пластинами, как показано на иллюстрациях. Закрепим Arduino и батарейный отсек на верхней платформе робота.
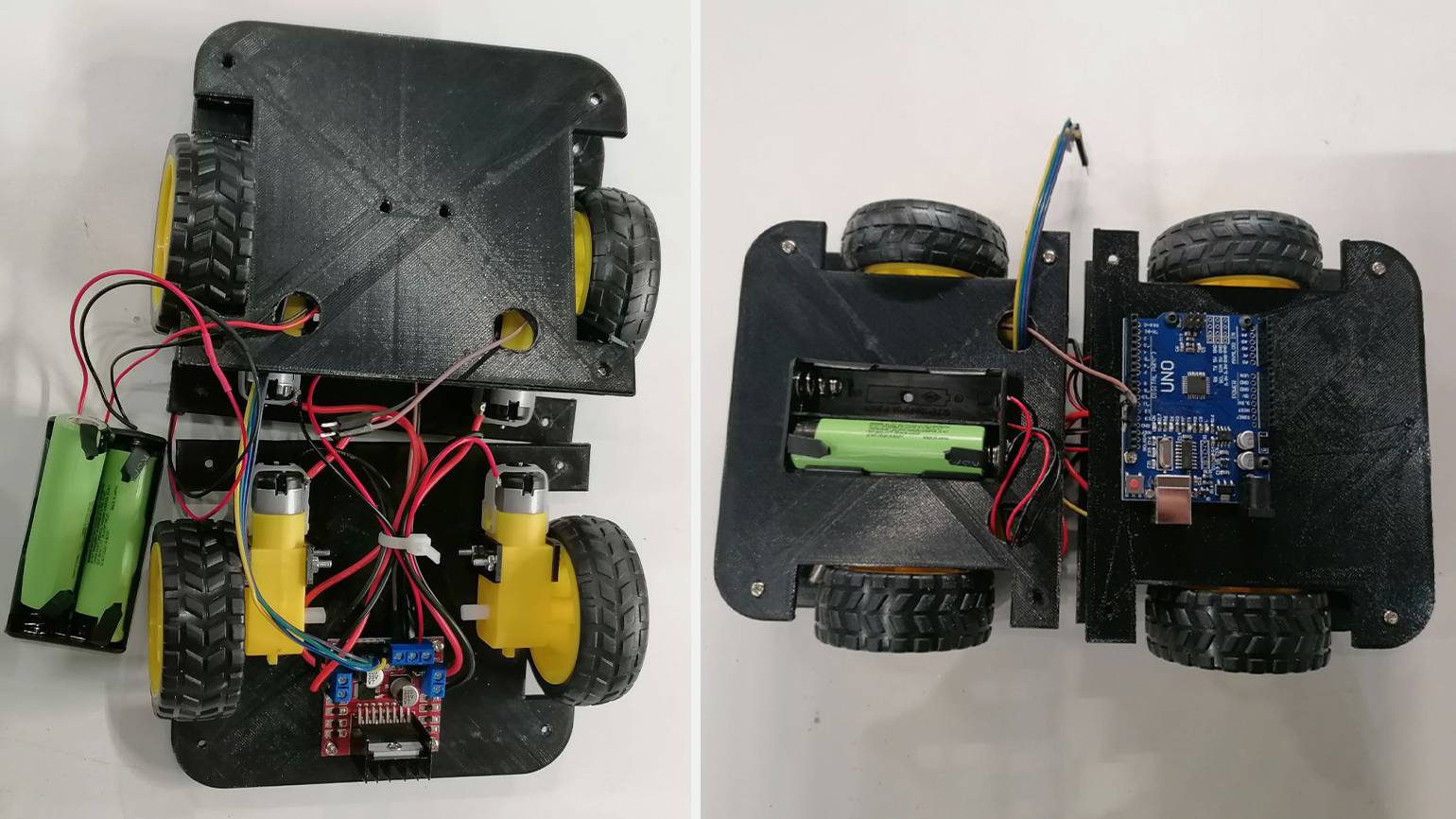
По завершении сборки ваш робот будет выглядеть так.

Поздравляем, вы только что собрали своего собственного робота ? Самое время заказывать пиццу, запускать сериал и всячески праздновать первый крупный робоуспех. В следующей части расскажем, как запрограммировать робота, настроить Arduino IDE и наладить управление машинкой со смартфона. Чтобы не пропустить вторую часть, продолжайте следить за выходом статей на сайте и в нашем телеграм-канале ?
Другие статьи про роботов в Skillbox Media

Научитесь: Программист микроконтроллеров
Узнать больше
Что нужно знать?
Весь процесс состоит из двух этапов: сборки и программирования. Чтобы собрать хорошего робота, нужны знания в механике. Чтобы запрограммировать робота на определённые действия, нужно знать язык, который поймёт системная плата или программный блок. Школьными знаниями по информатике тут не обойтись.
Где взять материал?
Сначала нужно решить, как вы хотите собирать робота: из готовых наборов или самостоятельно подбирать материалы. Преимущество набора в том, что вам не нужно искать детали по отдельности. Чаще всего из одного набора можно собрать несколько устройств.
Конструкция, собранная не из готового набора, называется открытой системой. У неё тоже есть свои плюсы: ваш робот будет индивидуальностью, и вы сами сможете улучшать конструкцию. Но времени и сил потратите однозначно больше.
Из чего состоит робот?
Корпус – металлическое или пластмассовое «тело», к которому прикрепляются остальные детали. У каждого робота есть источник энергии – батарейки или аккумулятор. В зависимости от того, какую задачу будет выполнять робот, выбирают датчики: они могут определять цвет и свет, реагировать на касание.
Чтобы заставить робота двигаться, понадобятся моторы. «Голова» всего механизма – системная плата или программный блок. С их помощью робот подключается к компьютеру и получает набор задач.
Как заставить его что‑то делать?
Чтобы робот выполнил какое‑то действие, нужно создать компьютерную программу. Сложность этого этапа зависит от сборки. Если робот собран из набора Lego Mindstorms или mBot, то с их программным обеспечением справятся даже дети.
Если вы собираете робота сами, вам нужно изучить основы программирования и язык, на котором собираетесь писать программу, например C++.
Почему робот может не выполнить программу?
Попадая в новое место, он может сбиться и выполнять программу неверно. Для того чтобы робот делал всё правильно, надо отрегулировать датчики. Например, слишком яркое освещение может помешать адекватно распознать цвета. В зависимости от поверхности, по которой передвигается робот, регулируют мощность моторов.
Можно научиться собирать и программировать в школе?
Несмотря на то что робототехника не входит в школьную программу, преподаватели по физике и информатике могут научить ребёнка собирать и программировать. В Белгороде в некоторых школах есть кружки, где делают роботов.
«После уроков с учителями физики и информатики мы учимся программировать. Уже умеем работать в LegoMindstorms и Robolab (программное обеспечение для роботов – прим. авт.). Также иногда учимся делать 3D-чертежи деталей», – рассказали ученики Белгородского инженерного юношеского лицея-интерната и участники «РобоФеста-2018» Антон Першин и Дмитрий Чернов.
Где, кроме школы, можно стать робототехником?
В инжиниринговой школе БелГУ есть класс, в котором учат собирать и программировать роботов. В 2017 году в Белгороде открылся «Кванториум», в котором робототехнике учат школьников с девяти лет.
Чтобы стать настоящим робототехником, можно поступить на робототехнический факультет. В Белгороде пока таких нет, но в БГТУ им. Шухова есть кафедра технической кибернетики. Её студенты занимают призовые места на всероссийских соревнованиях по робототехнике.
Можно ли научиться самому?
Да. Есть множество ресурсов в Интернете, на которых можно узнать, из чего собрать и как запрограммировать робота.
Будет ли робот полезным?
Его можно приспособить под бытовые задачи и сделать помощником в доме. В Интернете есть много примеров, как домашние изобретатели создают роботов для выпечки блинов или уборки квартиры.
Как подтвердить свои успехи в создании роботов?
Принять участие в таких соревнованиях, как «РобоФест». На них в зависимости от возраста и направления существуют разные номинации. В основном у каждого вида робота есть трасса, на которой он выполняет задания: захватить кубик или прочертить линию. Есть и статичные системы, в которых судьи оценивают презентацию проекта и работу механизмов.
Как правило, участники приезжают на соревнования с собранными роботами и при подготовке тратят время только на калибровку датчиков и корректировку программы.
Редакция благодарит за помощь в создании материала участников «РобоФеста-2018» Дмитрия Агафонова, Дмитрия Чернова, Антона Першина и Данила Мигрина.
🔗 ГДЗ, Решебники, ответы тут 🔗
Информатика
Вопрос:
В чем заключается важность инструкции при сборке роботов?
Ответ:
Все ответы из этого учебника
Все вопросы по Информатике
Похожие вопросы
Вопрос:
Расскажите, в каких областях используются роботы.
Посмотреть ответ
Вопрос:
Почему при увеличении растровых изображений качество изображения ухудшается?
Посмотреть ответ
Вопрос:
На какие виды делится компьютерная графика?
Посмотреть ответ
Вопрос:
Какие фигуры есть в редакторе Paint?
Посмотреть ответ
Вопрос:
Что относится к устройствам передачи информации?
Посмотреть ответ
Вопрос:
Виды информации
Посмотреть ответ
Вопрос:
Айгерим создала рисунок в графическом редакторе и сохранила его на Рабочем столе. Она хотела увеличить рисунок и распечатать, но рисунок потерял качество изображения. Как ты думаешь, почему? Объясни причину Айгерим.
Посмотреть ответ
Вопрос:
Из каких элементов состоит векторная графика?
Посмотреть ответ
Вопрос:
Какие виды роботов ты знаешь?
Посмотреть ответ
Вопрос:
В каких направлениях можно поворачивать рисунок в Inkscape?
Посмотреть ответ
Муниципальное общеобразовательное
учреждение «Разметелевская средняя общеобразовательная школа»
Коллективный
проект
по
технологии
Сборка(пайка)
простейшего робота.
Авторы:
учащиеся 9 А класса
Репин Г., Боровских Ф.
Руководитель:
Иванова
Ольга Васильевна,
учитель
технологии
д.Разметелево
2022/ 2023
Оглавление
Введение
Теоретическая
часть
1.1
Что такое роботы?
1.2
История создания первого робота ?
1.3
Виды роботов?
Практическая
часть
2.1 Выбор между паяльной платой и ардуино
2.2 Технологическая поседовательность, для выполнения работы
Заключение
Список
литературы
Введение
С
каждым днем технологии постоянно развиваются, и они полностью заполнили нашу
обыденность. Если оглянуться вокруг, то можно увидеть множество современных
новинок, которые буквально за 30 лет уже вошли в наш быт и кажутся довольно привычным
для нашей повседневной жизни. Например, мы каждый день пользуемся мобильными
телефонами, компьютерами, лифтами и стиральными машинами, всё это появилось
совсем недавно. А если рассматривать более промышленную эксплуатацию, то роботы
рассматриваются уже как более профессиональные устройства, например, они
помогают людям при тяжелых работах, большим объёмом сварки, перемещении грузов
и т.д., чтобы вред для человека был минимален.
Роботы
— это механические друзья человека в 21 веке которые выполняют работу по
заранее заложенной в них программе. Роботы изменили жизнь человека в лучшую
сторону и именно об этом наша тема проекта.
Актуальность:
Тема роботов, очень актуальна, так как применение
робототехники в различных сферах деятельности человека становится все шире и в
перспективе позволит исключить участие человека в опасной для его жизни и
здоровья роботе.
Цель:
Создать
простейшего робота.
Основные задачи:
1.
Изучить необходимую литературу.
2.
Научиться пользоваться пальником и изучить
ТБ.
3.
Подготовить проект к защите.
Теоретическая часть
1.1 Что такое роботы?
РОБОТ — стационарная или
передвижная автоматическая машина (или дистанционно управляемый механизм),
способная выполнять аналогично человеку двигательные и управляющие функции и
призванная заменить человека при выполнении тяжёлой, однообразной или опасной
для его жизни и здоровья работы, а также при проведении её при недоступности
объекта. Слово «робот» произошло от чешского robot от «robota» — «барщина,
подневольный труд». От этого же слова берёт этимологическое начало
древнерусское слово «рабство» и старославянское «работа». Впервые слово robot
было напечатано в 1920 году в пьесе Карела Чапека «R.U.R», а придумал его брат
писателя – Йозеф. Более точное определение робота и связанных с ним понятий
дается в стандартах ГОСТ Р ИСО 8373-2014 «Роботы и робототехнические
устройства. Термины и определения» и в соответствующем международном стандарте
ISO 8373:2012 «Robots and robotic devices — Vocabulary» : «Робот — приводной
механизм, который можно запрограммировать по двум и более осям, имеющий
некоторую степень автономности, движущийся внутри своей рабочей среды и
выполняющий задачи по предназначению», где «автономность — способность
выполнять задачи по предназначению, основанная на текущем состоянии изделия и
особенностях считывания данных без вмешательства человека».
1.2 История создания первого робота ?
Если
верить историческим данным, первые роботы в мире были созданы примерно в 300
году до нашей эры. Тогда, на маяке египетского острова Фарос, были установлены
две огромные фигуры в виде женщин. В дневное время они хорошо освещались сами
по себе, а ночью загорались искусственным светом. Время от времени они
поворачивались и били в колокол, а ночью издавали громкие звуки. И все это
делалось для того, чтобы прибывающие корабли вовремя узнавали о приближении к
берегу и готовились к остановке. Ведь иногда, при возникновении тумана или
кромешной ночи, берег можно было и не заметить. И этих женщин вполне можно
назвать роботами, ведь их действия точно соответствуют значению слова «робот».
Изобретателем одного из первых роботов считается итальянский ученый Леонардо да
Винчи. Судя по документам, обнаруженным в 1950-е годы, художник разработал
чертеж человекоподобного робота в 1495 году. В схемах был изображен каркас
робота, который был запрограммирован выполнять человеческие движения. Он
обладал анатомически правильной моделью челюсти и умел садиться, двигать руками
и шеей. Записи гласили, что поверх каркаса должна быть надета рыцарская броня.
Скорее всего, идея создать «искусственного человека» пришла в голову к
сожалению, ученым не удалось найти подтверждений тому, что робот Леонардо да
Винчи действительно был создан. Скорее всего, идея так и осталась на бумаге и
так и не была воплощена в реальность. Зато робот был воссоздан в современности,
спустя сотни лет после разработки чертежа. Сборкой робота занялся итальянский
профессор Марио Таддей, который считается экспертом по изобретениям Леонардо да
Винчи. При сборке механизма он строго следовал чертежам художника и в конечном
итоге создал то, чего хотел добиться изобретатель. Конечно, широкими
возможностями этот робот не блещет, но зато профессор смог написать книгу
«Машины Леонардо да Винчи», которая была переведена на 20 языков.
Первый робот-музыкант.
Спустя
несколько сотен лет после Леонардо да Винчи, попытки создать искусственного
человека предпринимал французский механик Жак де Вокансон. Если верить
историческим документам, в 1738 году ему удалось создать робота, строение
которого полностью копирует анатомию человека. Он не мог ходить, зато отлично
играл на флейте. Благодаря конструкции из множества пружин и устройств для
вдувания воздуха в различные части механизма, робот-флейтист мог играть на
духовом инструменте при помощи своих губ и движущихся пальцев. Демонстрация
робота прошла в Париже и была описана в научном труде «Le mécanisme du fluteur
automate». Советский Союз ни в чём не собирался уступать Западу, поэтому,
несмотря на множество внутренних проблем в середине 30-х годов, вопросу
разработки машин-помощников учёные и инженеры-конструкторы уделяли много
внимания. Однако парадокс заключается в том, что первого советского робота
собрали не они, а шестнадцатилетний школьник Вадим Мацкевич. Это был безусловно
очень одарённый ребёнок, ведь в его копилке уже было не одно, а целых два
изобретения: в 8 лет он собрал компактную радиостанцию, а в 12 – сделал
самодвижущуюся модель броневика, стреляющую ракетами.
Естественно,
что к 16 годам о мальчике знала вся страна, и у него были все возможности и
материалы для создания очередной задумки. В результате в 1936 году на
тематической выставке в Париже был представлен первый советский робот
конструкции «В2М». Высота модели составляла 1,2 м, управление осуществлялось
через пульт, всего робот выполнял 8 команд, заключающихся в шевелении
конечностями.
1.3 Виды роботов?
Роботизированные
манипуляторы или стационарные роботы
1.
Декартовы роботы, пожалуй, наиболее распространенный тип роботов, используемых
как в промышленных, так и в коммерческих целях. Иногда их называют портальными
роботами, они имеют три линейные оси, т.е. Они могут двигаться только по прямой
линии, а не вращаться, и установлены под прямым углом. Механическое устройство
декартовых роботов намного проще, чем у большинства других стационарных роботов.
2.
Цилиндрические роботы обычно используются для сборки, точечной сварки и
машинного литья под давлением. Хотя в наши дни эти типы роботов относительно
редки, они все же могут быть полезны. Как следует из названия, он образует
цилиндрическую рабочую систему координат. Иногда эти цилиндрические роботы
ошибочно принимают за роботов SCARA или наоборот. Несмотря на то, что их
рабочая среда почти одинакова, их структура и область применения различаются.
3.
Роботы SCARA или Selective Compliance Assembly/Articulated Robot Arm
(Сочлененный рабочий манипулятор) более широко используется для сборки во всем
мире благодаря простоте и беспрепятственного монтажа. Роботы SCARA обычно имеют
так называемую последовательную архитектуру, в которой один базовый двигатель
должен нести все остальные установленные двигатели. Одним из недостатков этих
типов роботов является то, что они чрезвычайно дороги по сравнению с довольно
недорогими декартовыми роботами. Кроме того, для работы им требуется сложное
программное обеспечение высокого уровня.
4.
Параллельные роботы более известны как параллельные манипуляторы, в которых
связка управляемых машиной роботизированных цепей поддерживает конечный
эффектор или просто конечную платформу. Одним из лучших примеров этого типа
роботов являются имитаторы полета, которые военные и коммерческие пилоты
используют для улучшения своих летных способностей путем моделирования реальных
ситуаций. Слово «параллельный» не должно быть неправильно понято, так
как оно подразумевает не геометрическую установку, а, скорее, уникальную
характеристику робота данного типа в компьютерной науке. Здесь параллель
означает, что конечная точка каждой индивидуальной связи полностью отличается
от других. Параллельный робот специально разработан, чтобы оставаться жестким и
противостоять всем нежелательным помехам и движениям, в отличие от серийных
роботов-манипуляторов. Хотя каждый привод работает с определенной степенью
свободы, их гибкость в конечном итоге ограничивается другими приводами. Его
жесткость и прочность отделяют параллельные манипуляторы от серийных цепных
роботов.
5.
Шарнирные роботы Когда кто-то говорит о промышленных роботах, есть большая
вероятность, что они имеют в виду шарнирных роботов. Эти роботы чрезвычайно
универсальны и хорошо подходят для промышленных работ, в отличие от большинства
других типов роботов, которые мы показали выше. Эта маневренность и
универсальность проистекают из дополнительных осей, которых обычно от четырех
до шести, но может достигать и 10. Их основные области применения — погрузочно-разгрузочные
работы, дозирование, сварка и т.д.
6.
Сферические роботы По уровню сложности сферические роботы находятся где-то
между декартовыми или цилиндрическими роботами и сверхсложными
шарнирно-сочлененными роботами. По сути, сферический робот — это робот среднего
размера внутри сферического шара, который движется с помощью IDU (Internal
Driving Unit). Эти мобильные сферические роботы чрезвычайно эффективны при
наблюдении и мониторинге, а также могут использоваться под водой. Колесные и
ножные роботы
7.
Одноколесные роботы Мы все ездили на велосипеде или мотоцикле по крайней мере
один раз, но сколько из вас на самом деле ездили на одноколесном велосипеде?
Проблема в том, что одноколесные велосипеды нестабильны, как велосипеды,
поэтому их сложно удерживать в равновесии, и без надлежащей поддержки можно
мгновенно упасть. Создание одноколесного робота представляет собой сложную
задачу для инженеров, поскольку они должны сделать его динамически стабильным,
а также эффективным.
1.4 Робототехника в современном мире
Робототехника
является одним из важнейших направлений научно-технического прогресса. Роботы
применяются в различных сферах: в промышленности, в медицине, в строительстве,
в сельском хозяйстве и животноводстве, в науке и т.д. Очень многие процессы в
жизни человек уже и не мыслит без робототехнических устройств. По последним
данным, сегодня в мире работают более 1,8 млн. самых различных роботов
-промышленных, бытовых, медицинских, роботов-игрушек.
Практическая часть
2.1 Выбор между паяльной платой и ардуино
Паяльные роботы являются недорогим и простым в
использовании решением для производств электроники. Данные системы
помогают выполнять селективную пайку изделий в экспериментальных
лабораториях или на единичных и мелкосерийных производствах, в случаях
невозможности использования пайки волной припоя. Конструкция робота
представляет собой аналог паяльной станции с автоматической подачей трубчатого
припоя (с включением флюса). В конструкцию робота включены приводы по 4-м осям,
система обучения точек пайки, а также возможность создания программы пайки всех
нужных точек печатного узла.
Arduino — это не просто универсальный
микроконтроллер, который можно адаптировать под любой проект за минимальное
время. Это простейшая и доступная для изучения среда разработки Arduino IDE,
которая служит для вовлечения в программирование и робототехнику, а также для
быстрой разработки проектов. На основе Arduino можно собрать 3D-принтер или
станок с ЧПУ. Все это происходит благодаря тому, что у платформы Arduino одно
из самых больших сообществ, а также доступно огромное количество примеров,
руководств и готовых библиотек для разработки.
Вывод: мы решили взять паяльную плату т.к.
детали совместимы с обоими платами и паять гораздо интереснее.
Выполнение технологический операций. Соблюдение
технологической последовательности.
2.2 Технологическая последовательность, для
выполнения работы
1. Включение паяльника. Вставляем блок
питания паяльника в розетку, т.к. без электричества паяльник не будет работать.
2. Детали. Достаем детали: Вытаскиваем
детали из упаковки.
3. Температура паяльника. Дождаться
нагрева паяльника. Если паяльник будет не нагрет до температуры 300 градусов,
припой не будет плавиться, и мы не сможем присоединить детали к плате.
4. Припой. Достаем припой. Припой нужен, для
того чтобы присоединить детали к плате.
5. Пайка. Подносим припой и паяльник,
оставляем каплю припоя на месте контакта детали и платы. Далее берем деталь,
нагреваем каплю, и вставляем в нее нашу деталь. Так припаиваем все детали.
6. Двигатели и колеса. Берем двигатели от
робота, и приклеиваем их к плате с помощью двухстороннего скотча, затем
прикрепляем колеса к двигателям и закручиваем винтами.
7. Программа. Пишем программу, которая
будет находится в микросхеме, и управлять роботом.
8. Микросхема. Загружаем нашу программу на
микросхему, и после вставляем ее в специальный разъем на плате.
9. Батарейки. Берем батарейки, и вставляем
их в слоты для батареек.
10. Запуск. Запускаем робота, и проверяем,
что все работает так, как было запланировано.
Заключение
В качестве научного открытия
мы, возможно, должны считать робота как продукт многовековой эволюции
человеческой мысли всего человечества.
Трудно недооценить смысла созданного робота для
техники. Ведь изобретение робота сильно изменило всю жизнь человека. Это
значимое событие в истории техники. История создания робота покрыта тайнами. И
даже то, что в наличии большое количество свидетельств, трудно узнать
достоверное время появления первого робота.
Анализируя
изобретение робота, можно сказать, что робот был изобретен, не таким,
каким мы привыкли его видеть. Множество людей билось над изобретением робота.
Проведя
исследование, мы сделали выводы, что робота можно создать и в домашних
условиях. Конечно, он не заменит человека, но роботы могут избавить
людей от тяжелой и скучной работы, а детям послужить интересной и обучающей
игрушкой.
Приложение 1
Правила безопасности работы с паяльником
1.
Никогда не дотрагивайтесь руками или другими
частями тела до нагревательного элемента и жала паяльника.
2.
Держите в руке паяльник только за предусмотренную
для этого ручку и соблюдайте аккуратность при работе с ним. Неосторожное обращение
с паяльником и припоем в разогретом состоянии чревато болезненными ожогами (!).
3.
Во избежание повреждения мебели, выполняйте
паечные работы на идущей в комплекте деревянной подложке.
4.
В то время, когда непосредственно не работаете с
паяльником и он находится в нагретом состоянии, устанавливайте паяльник на
специальную термостойкую подставку, которая идет в комплекте с паяльником.
5.
В связи с тем, что при пайке выделяется в
незначительных количествах дым, выполняйте пайку в хорошо проветриваемом помещении.
Крайне желательно наличие вытяжной вентиляции над местом проведения работ.
6.
Не убирайте паяльник в коробку сразу после
окончания работы. Он еще продолжительное время остается горячим! Подождите 10
минут или более, пока паяльник остынет.
7.
При пайке мелких деталей удерживайте их
пинцетом. Использование пинцета для удерживания поможет избежать ожогов.
Список литературы
1. Евгений Юревич, «Основы робототехники» Год издания
2018
2. Корендясев А.И., «Теоретические основы робототехники» Год
издания 2006
3. Иванов А.А, «Основы робототехники» Год издания 2020
4. Владимир Гололобов, «С чего начинаются роботы?» Год издания
2011
5. Мамичев Д.И., «Роботы своими руками. Игрушечная электроника»
Год издания 2015